无人机实验 ¶
约 1211 个字 48 行代码 预计阅读时间 5 分钟
基础信息
时间: 分组: 实验内容: 实验要求:4000字以上报告 tips:每组一位助教,珍惜助教hhh
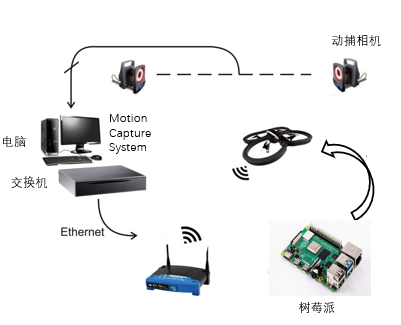
硬件平台 ¶
硬件搭建 ¶
qgroundcontrol
Download and Install | QGC Guide (master)
树莓派安装 ¶
树莓派发烫
解决方法:因为实验室没有多余的风扇套装了,所以在淘宝购买了两个树莓派风扇。
动捕测试 ¶
软件搭建 ¶
网络遇到问题
在开始组装时候,遇到了校网连接问题,无法下载软件。
基本 linux ¶
换源 ros,pip -> fishros
wget http://fishros.com/install -O fishros && . fishros
sudo apt-get update
sudo apt-get upgrade
terminator
sudo apt-get install terminator
ssh¶
sudo apt install net-tools
ifconfig
sudo apt-get install openssh-server
ssh user@remote
ssh -X ldz@192.168.0.1 # 带图形化界面
ssh -p 1234 ldz@192.168.0.1 # 指定端口
vim /etc/ssh/sshd_config
- 第 33 行 : 将 PermitRootLogin without-password(第 33 行) 改为 PermitRootLogin yes 并去掉前面的注释符号(#)
- 第 57 行 :#PasswordAuthentication yes( 第 57 行 ) 的注释去掉,如果是 no 就改为 yes
- 保存
service ssh restart
验证安装
service ssh status

开机自启动
update-rc.d ssh enable
配置免密登陆
ssh-keygen -t rsa
passphrase,不设置则为空,这里看心情吧,如果不放心私钥的安全可以设置一下)
执行结束以后会在/home/当前用户 目录下生成一个 .ssh 文件夹 , 其中包含私钥文件 id_rsa 和公钥文件 id_rsa.pub。
ssh-copy-id 会将公钥写到远程主机的 ~/.ssh/authorized_key 文件中
ssh-copy-id name@ip
注意,windows 的 cmd 中不能直接执行 ssh-copy-id 命令,可以使用 git bash 或者其他 linux 终端工具
当出现
Number of key(s) added: 1 Now try logging into the machine, with: "ssh 'HAHA@127.0.0.1'" and check to make sure that only the key(s) you wanted were added.
说明配置成功!
vscode¶
fishros 下载比较方便
wget http://fishros.com/install -O fishros && . fishros
ros¶
fishros 下载比较方便
wget http://fishros.com/install -O fishros && . fishros
20.04 装 noetic
htop | 系统状态监测与进程管理 ¶
sudo apt-get install htop
nomachine¶
查看芯片架构
uname -m
在官网上下载对应的版本 NoMachine - NoMachine for Arm
sudo dpkg -i nomachine_7.6.2_4_armhf.deb
PlotJuggler¶
简介
PlotJuggler,一个基于 Qt 的应用程序,允许用户加载、搜索和打印数据。许多 ROS 用户会为此使用 MATLAB 或 rqt_plot,但是当要分析的数据相当大时,使用这些解决方案可能会不尽人意。
PlotJuggler 是 rqtplot 和 rqtbag 更好的替代品,它提供了更友好的用户界面。
- Multiplot( 多曲线 ):将多条曲线添加到绘图中。在行、列、选项卡和 / 或单独的窗口中排列绘图。
- Zoom( 缩放 ):轻松缩放绘图。可以锁定所有绘图的 X 轴。
- Save/Load layouts( 保存 / 加载布局 ):组织布局后,可以将其保存到文件中以供以后重用。
- Complete Undo/Redo( 完全撤消 / 重做 ):CTRL-Z 按您的预期操作。
- DataLoad plugins( 数据加载插件 ):轻松加载 CSV 或 rosbags。
- DataStreaming plugins( 数据流插件 ):订阅一个或多个 ros 主题并实时绘制它们的数据。
- RosPublisher plugin(RosPublisher 插件 ):使用交互式跟踪器重新发布原始 ROS 消息。
sudo apt-get install ros-noetic-plotjuggler
roscore
rosrun plotjuggler plotjuggler
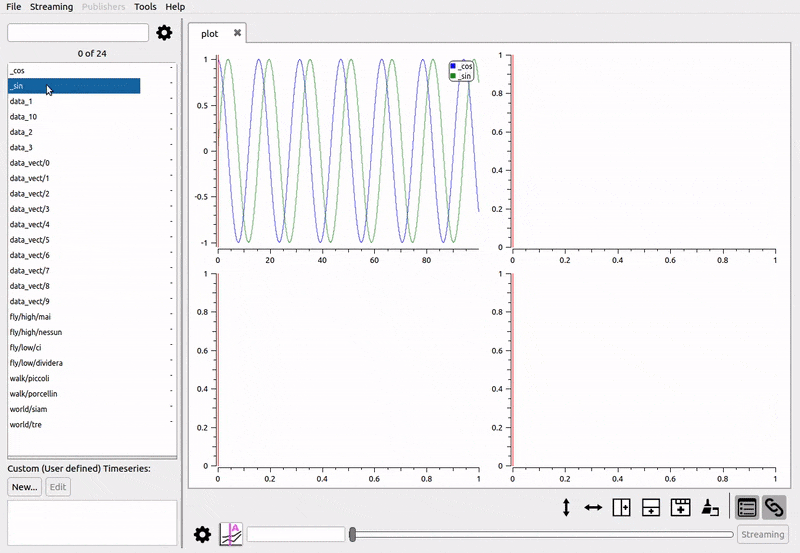
可以看到如下界面
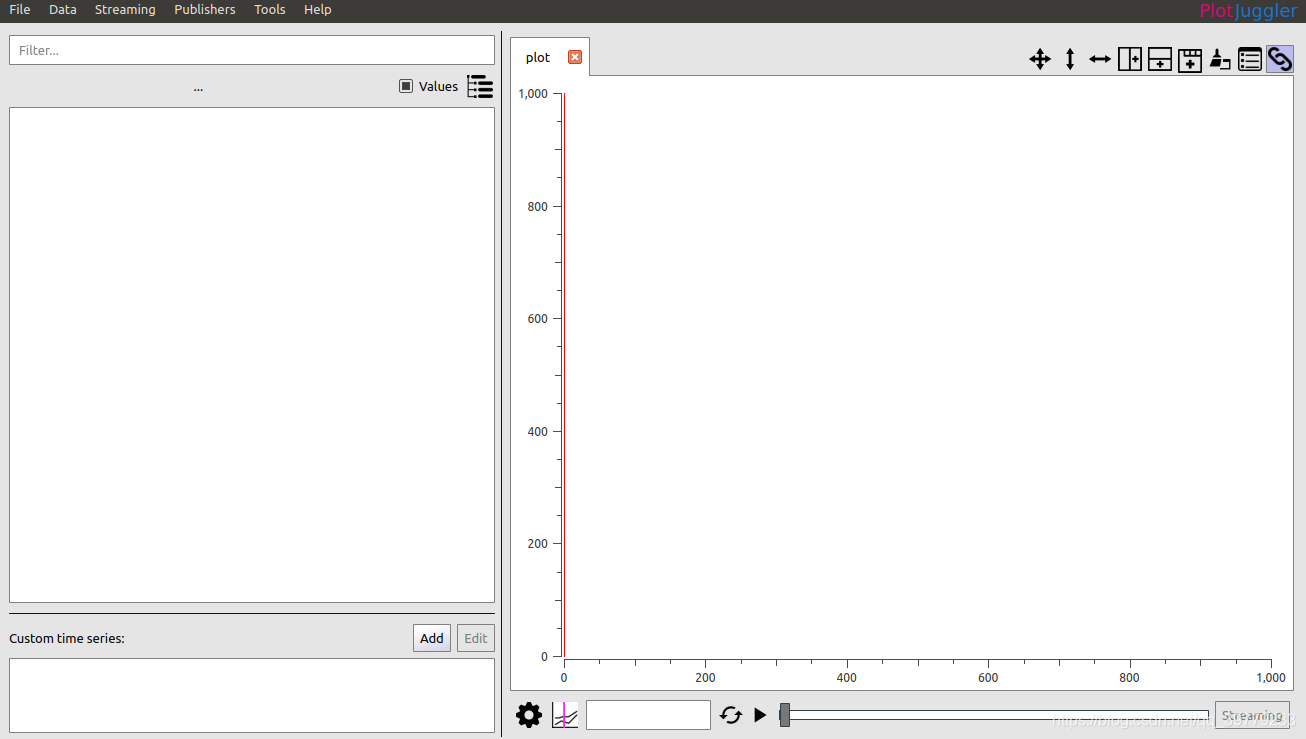
教程 | PlotJuggler 绘图工具的安装使用 -CSDN 博客
vrpn¶
Pixhawk+PX4+VRPN +NOKOV 无人机飞控平台动捕数据传输 _vrpn 服务器 -CSDN 博客
cd ~/catkin_ws/src
git clone https://github.com/clearpathrobotics/vrpn_client_ros.git
sudo apt-get install ros-noetic-vrpn
cd ~/catkin_ws
catkin_make
查看电脑 ip 地址
roslaunch vrpn_client_ros sample.launch server:=192.168.43.195:3883

rostopic echo /vrpn_client_node/<刚体名称>
mavros¶
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras ros-noetic-control-toolbox
cd /opt/ros/noetic/lib/mavros
sudo ./install_geographiclib_datasets.sh
sudo chmod 777 /dev/ttyACM0
cd real_ws
sudo cp src/mavros_launch_files/px4_pluginlists.yaml /opt/ros/noetic/share/mavros/launch
sudo cp src/mavros_launch_files/px4.launch /opt/ros/noetic/share/mavros/launch
启动 mavros,检查是否正常通信:
roslaunch mavros px4.launch
另一个终端
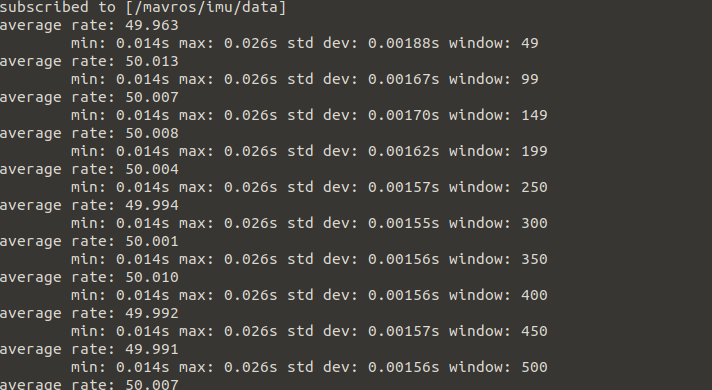
rostopic hz /mavros/imu/data
应该能得到如图所⽰的 50hz imu 数据
数学建模 ¶
仿真 ¶
代码实现 ¶
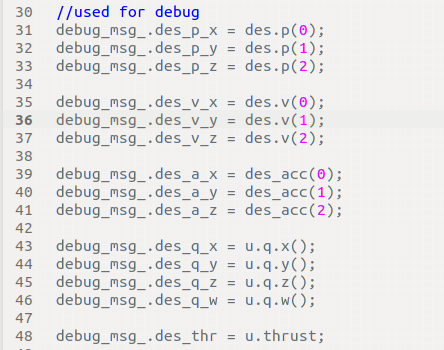
要编写的控制器部分代码位于real_ws/src/px4ctrl/src/linear_control.cpp
其中computeDesiredCollectiveThrustSignal函数⽤来根据加速度计算油门百分⽐,在实际过程中通过在线估计参数,这部分不需要同学们实现,只需要给定加速度即可。
另外需要计算的是⽆⼈机的姿态u.q。
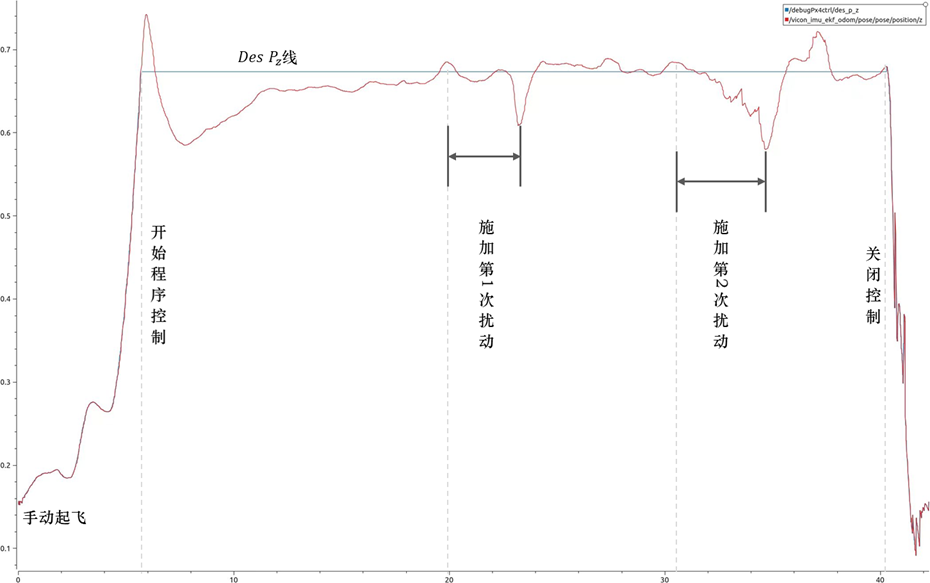
程序提供了debug的接⼝,通过rostopic向外发送,可通过run.sh中最后一行注释记录rosbag,通过plotjuggler进行后续分析(详⻅ros仿真中的说明)
参数⽂件位于real_ws/src/px4ctrl/config/ctrl_param_fpv.yaml,可调节增益参数。
attention¶
- 注意实验安全!!!
- 四元数、旋转矩阵、欧拉⻆之间的转换
- 世界系、机体系的坐标变换
- 建议在实物控制器测试前确保其它模块功能正常
调试 ¶
移动飞机,查看获得的位姿是否连续光滑
检查动捕球、动捕相机、刚体识别是否都正常
注意小组间区分
启动 ¶
已经将所有要启动的程序写在⼀个脚本run.sh中,只需要⼀键即可启动,但需要先检查各个 ros 节点的 topic 是否正确:
⾸先根据在动捕中创建的刚体名称,修改src/ekf_pose/launch/PX4_vicon.launch中接收的位姿 topic
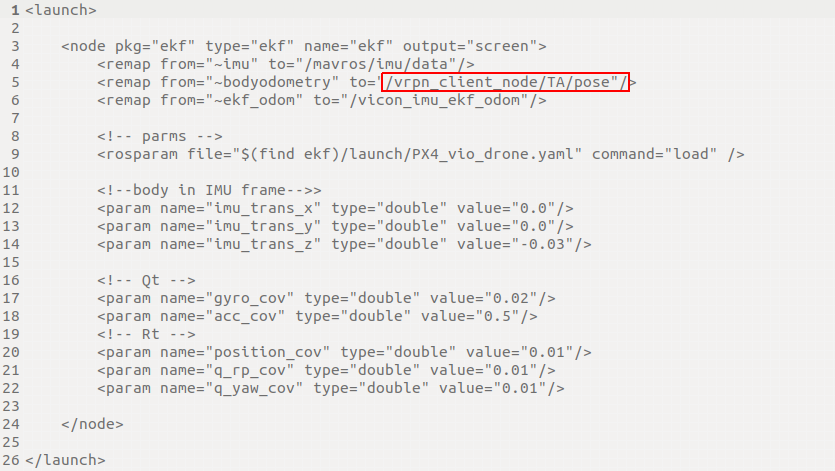
改节点利⽤ EKF 扩展卡尔曼滤波,对 imu 和动捕的数据进⾏融合估计,我们以此结果作为⽆⼈机的里程计信息给到控制器。
随后修改 run.sh 中启动 vrpn 的 ip 为动捕主机的 ip

catkin_make
source devel/setup.bash
./run.sh
可通过 rqt_graph 来检查各模块间的通讯是否正常。
调试方法 ¶
- 录 rosbag,记录里程计数据
rosbag record /sim/odom - plotjuggler 数据分析软件
结果 ¶