机建复习 ¶
约 3086 个字 预计阅读时间 12 分钟
A4¶
机建 回忆卷 ¶
2023 春 英文班 ¶
2023-2024 春
判断题(2 * 5
三轴相交是逆运动学有解析解的充分条件
选择题(2 * 5)
:下列说法错误的是
A. 旋转矩阵特征值均为 1
B. 旋转矩阵行列式为1
C. 旋转矩阵列向量相互正交
D. 旋转矩阵列向量为单位向量
填空题
填空题 1:线加速度公式
填空题 2:齐次变换矩阵求逆
填空题 3:旋转矩阵转四元数
大题
大题 1:给定一个 DH 参数表,求 \(^0_2T\)
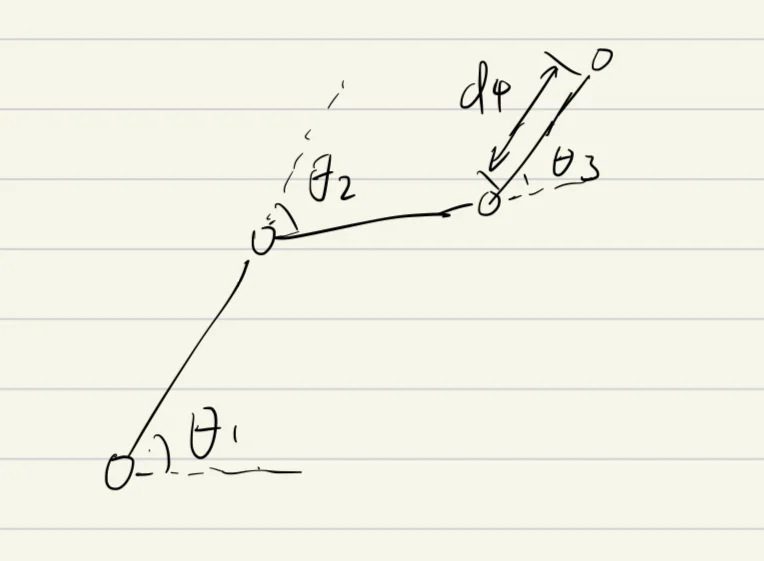
大题 2:平面三连杆,\(\theta_2\),\(\theta_3\) 为定值,1 为转动关节,4 为移动关节
(1)求末端速度
(2)求奇异位形
(3)机械臂末端给一个力,\(f_x\),\(f_y\)给定,给一个z轴力矩,求关节力矩
大题 3:四元数插值
(1)请描述四元数插值与欧拉角插值的优势与劣势
(2)给定初始和结束两个q,slerp插值,\(q_0 = [\frac{1}{2},\frac{1}{2},\frac{1}{2},\frac{1}{2}]\) \(q_1 = [\frac{\sqrt{3}-1}{4}, -\frac{\sqrt{3}+1}{4}, -\frac{\sqrt{3}+1}{4}, \frac{\sqrt{3}-1}{4}]\)
(3)要求角速度初始结束为0,中间段为常数,角速度连续,进行规划
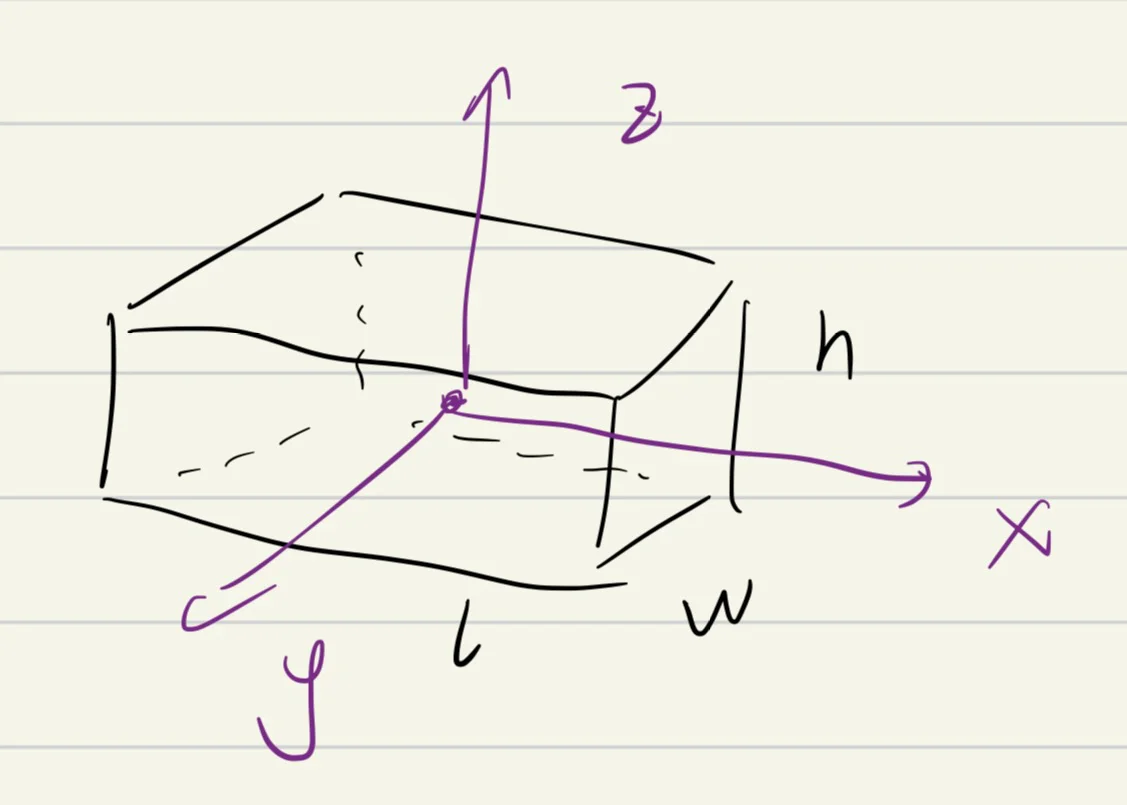
大题 4:计算转动惯量,质量为 m,坐标系建在质心 \(\rho = k(\frac{l^2}{4} - x^2)\)
(1)求 k
(2)求转动惯量
大题 5:两连杆机械臂,一个转动关节一个移动关节,质量集中于末端,标在图上了,求动力学方程

大题 6:长方体工件插入问题
(1)给定任务,把长方体工件插入长方体凹槽,求自然约束和人工约束
(2)-(3)都是阻抗控制相关,没看懂题目
2023 春 ¶
判断题 1:分析雅克比是姿态的最小表示
判断题 2:牛顿欧拉法是基于力学的方法,拉格朗日法是基于能量的方法
判断题 3:一个旋转矩阵对应几个单位四元数
判断题 4:关节空间动力学模型的 \(G\) 和笛卡尔空间动力学模型的 \(G_x\) 是否一样
填空题
填空题 1:ZYX 欧拉角
旋转矩阵 \(R\) 的左边 6 项已知,求右边 3 项以及 \(\alpha\)、\(\beta\)、\(\gamma\)。利用 \(R\) 和欧拉角转换的公式即可,有一定计算量。
填空题 2:轨迹规划
给了一些条件,需要几次多项式规划;初末用多项式连接,中间用直线规划,有多少解。
填空题 3:惯量积
XY 平面是质量对称平面,哪几个惯量积为 0。
大题
四
右乘联体左乘积。
五
求末端速度在 0 坐标系的表示,求奇异位形,已知末端 \(f_x\)、\(f_y\)、\(n_z\) 求关节 \(\tau_1\)、\(\tau_2\)(\(l_z\) 是用前面算出的雅克比求的 \(\tau\),用内推法应该也可以
六
质量集中,求动力学方程(拉格朗日法即可
七
(1)拧螺丝(和 ppt 不一样,不能沿 Y 轴运动,而且要考虑向下的 Z 速度)写自然约束和人工约束。
(2)讲了什么叫"平行力位控制",就是力控制和位置控制并非正交,两个控制器的输出要相加。让结合力位混合控制的框图,画出平行力位控制的框图。这个在A4上抄了力位混合的框图就行。
(3)描述完成机器人按下门把推开门的控制策略和控制原理。
八
用四元数插补实现。初始 \(q_0\),结束 \(q_1\),要求角速度连续,且初末角速度均为 0。这个题没做过类似的,lz 结合了 Slerp 方法并加了两个待定系数,利用 \(q'(t=0)=0\) 和 \(q'(t=1)=0\) 求解出了两个待定系数,但是不知道对不对,这题有点抽象。
2022 春 ¶
判断题(5 分)
判断题 1:单位四元数 \(ab=ba\)
判断题 2:鲁棒控制和自适应控制参数变不变
判断题 3:奇异位形
填空题(10 分)
填空题 1:\(\alpha\)-\(\beta\) 分解
填空题 2:右乘联体左乘基
大题
一
正四面体三个顶点上画了三个坐标系,求一下三个 \(T\) 矩阵(属于是立体几何题
二
平面三自由度机械臂,第一个旋转关节,第二移动关节,第三个旋转关节,求 \(\theta_1\)、\(d_2\)、\(\theta_3\)。
三
起始点 \(0°\),有个中间点 \(40°\),终止点 \(70°\),中间速度连续,起始速度为 0,总时间 1s,两个二次多项式规划。
四
(1)算 0 坐标系下的雅可比矩阵
(2)题目给出具体的角度长度,让算一下各个关节的力矩。
五
两自由度机械臂,第一个旋转关节,第二个移动关节,要求用牛顿欧拉法算动力学方程。
六
(1)算了一个自然约束和人工约束
(2)混合力控框图和约束矩阵
机器人学 回忆卷 ¶
2023¶
2023-2024 机器人学 I 回忆卷 - CC98 论坛
2023¶
2023 机器人学 1/ 机器人学 I 回忆 - CC98 论坛
判断题:共 5 题,每题两分
- 旋转矩阵的转置仍然是旋转矩阵。
- 在一个串联关节机器人场景下,若其笛卡尔空间是 6 维,则其关节空间也是 6 维。
- 等效轴角表示是姿态的最小表示。
- 6 关节机器人中,速度域的奇异位形不一定是力域的奇异位形。
- 如果操作臂动力学模型为 \(\tau = M(\Theta)\ddot{\Theta} + V(\Theta, \dot{\Theta}) + G(\Theta)\),则其动能为 \(\frac{1}{2}\dot{\Theta}^T M(\Theta) \dot{\Theta}\)。
单选题
- 下面说法错误的是
- 单位四元数的积仍是单位四元数。
- 单位四元数的和仍是单位四元数。
- 单位四元数的共轭仍是单位四元数。
-
忘了。
-
姿态等效轴角表示有几组?
-
DH 表达法中,滑动关节的参数哪个是变量?
-
角速度矩阵 \(S\) 一定是
- 对称矩阵。
- 反对称矩阵。
- 旋转矩阵。
-
可逆矩阵。
-
关于齐次变换矩阵的说法正确的是: 选项忘了,但是应该是选最后一行一定是0001。
大题
一、矩阵计算
给了一个 \(R_{AB}\),然后 B 绕 K 转 \(\theta\),再给 \(R_{AB}\),求 K 和 \(\theta\)。用那个公式算就行,不过当时发现这两个矩阵的第二列相同,就偷懒了。
二、控制设计
设计一个跟踪装置,要求稳定闭环零点。
三、约束分析
一个操作臂,末端擦拭工件,求自然约束和人为约束。
四、动力学分析
考了书上的操作臂 RP 操作臂,不一样的是:关节 1 的 z 轴朝上,关节 2 和关节 1 有个 45° 夹角,从平面运动变成空间运动。用拉格朗日法求解动力学方程。
五、速度传递
一个 2R 连杆,跟书上不一样的是第二个关节转了 90°(有点像竹蜻蜓那样
2021-2022¶
2021-2022 夏《机器人学 I》回忆卷 - CC98 论坛
选择题
SCAR 工业机器人有几个滑动关节,几个转动关节?
关于角速度向量哪个说法是错的?
关于 PD 控制哪个说法是错的?
复阻抗是力与什么的比值?
二、欧拉角转换
给定 ZYZ 固定角,求 \(Z'Y'X'\) 欧拉角
三、旋转矩阵
已知 AB 之间旋转关系 1. 求B关于A坐标系下\(\{\frac{1}{\sqrt{3}}, \frac{1}{\sqrt{3}}, \frac{1}{\sqrt{3}}\}\)旋转\(30°\)后两坐标系旋转矩阵 2. 求B关于B坐标系下\(\{\frac{1}{\sqrt{3}}, \frac{1}{\sqrt{3}}, \frac{1}{\sqrt{3}}\}\)旋转\(30°\)后两坐标系旋转矩阵
四、角速度分析
已知两连杆参数,求 \(0\) 坐标系下 \(2\) 坐标系角速度
五、动力学分析
计算运动状态下连杆力,牛顿欧拉法或拉格朗日法那个,考虑重力,形状是横插在墙上的两连杆,第一个关节是移动关节,第二个关节是旋转关节
六、轨迹规划
给定最大加速度和最大速度绝对值,求最小时间从起始角度运动到终止角度的轨迹
七、控制设计
给定两力矩方程,设计线性控制方程(一个 \(Y\) 的矩阵,一个长得像 \(\theta\) 的那个字母)
八、约束分析
拧螺母的自然约束和人为约束
九、坐标变换
给定某 \(U\) 坐标系下 \(A\) 和 \(A'\) 的 \(T\)(位姿矩阵
2021¶
一、选择题
- 坐标系 A 和 B 重合,问欧拉参数
- 在 \(\mathbb{R}^3\) 中的向量外积是不是半群 / 群
- 问静力传递式中的矩阵和速度雅可比之间的关系
- 考察惯性张量 I 的相关性质
二、坐标变换
已知 \({}_B^A\!T\) 求 \({}_A^B\!T\)
三、静力分析
已知二连杆(与教材图 3-29 相同)静外力,求关节力矩
四、旋转矩阵
已知一部分 \(R_{Z'Y'X'}\) 的参数,求 R
五、动力学分析
一个 PR 机械臂,求动力学方程
六、控制设计
非线性控制器设计,使得 \(s=-2\pm0.5i\)
七、约束分析
求一个物块的自然约束
八、四元数
单位四元数插补
九、轨迹规划
约束条件下的单自由度机械臂运动规划
2019¶
一、坐标变换
已知 \({}_A^B\!T\) 矩阵,求 \({}_B^A\!T\) 矩阵
二、旋转矩阵
\(B\) 坐标系先绕自身 \(Z\) 轴旋转 \(30°\),再绕 \(A\) 坐标系 \(Y\) 轴旋转 \(45°\),再绕自身 \(X\) 轴旋转 \(60°\),求 \(R_{AB}\)。并用一组固定角表示出来。
三、运动学分析
二连杆机械臂,已知 \(\{0\}\) 坐标系下末端位置,末端线速度,求解关节角,关节角加速度。
四、静力分析
二连杆机械臂,已知两个关节的力矩,求解末端的作用力。
五、动力学分析
单连杆机械臂,求解动力学方程,用 \(\tau\)、\(\theta\)、\(\dot{\theta}\) 表示。
六、控制设计
二次系统求解控制律,动力学方程是 \(0.05\ddot{\theta} + 0.7\dot{\theta} + \cos(\theta)=\tau\),要求系统极点为 \(-1\pm2i\)。
七、轨迹规划
用两段三次曲线规划路径,已知起始静止在 \(30°\),中间点第 \(2\) 秒到达 \(50°\),最终第 \(4\) 秒停止在 \(90°\),要求中间点处加速度连续。
八、综合
- ZMP 有哪三种
- 已知左脚作用力为 \(20N\),作用点为 \((1,2)\),右脚作用力为 \(15N\),作用点为 \((3,4)\),求 ZMP
- Rodrigues 公式如何表示