机械臂 ¶
约 388 个字 8 行代码 预计阅读时间 2 分钟
Coppeliasim¶
环境配置 ¶
打开文件
- Windows:
C:\Users\<username>\AppData\Roaming\CoppeliaSim\usrset.txt - MacOS:
/Users/<username>/.CoppeliaSim/usrset.txt
将default Python项修改为所安装 Python 的路径(确保与 1 中的 python 一致) 注
找 python 路径的方法 Python:
python的安装路径\python.exeAnaconda:anaconda的安装路径\envs\env_name\python.exe
仿真环境验证
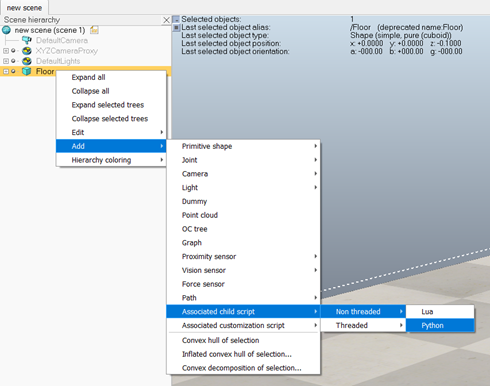
完成上述仿真环境配置后,进入 Coppeliasim 软件,右键new scene中的Floor,选择Add -> Associated child script -> Non Threaded -> Python
函数sysCall_init()中键入代码
floor = sim.getObject(".") # 获取当前场景中的 . 对象,"." 代表的是 当前对象,如果是在主脚本里运行,通常指的是整个场景的地面 (floor)
print(sim.getObjectPosition(floor, -1)) # 获取 floor 相对于 世界坐标系(-1 代表世界坐标系)的位置信息,返回的是 [x, y, z] 坐标。
运行并得到在控制台得到结果
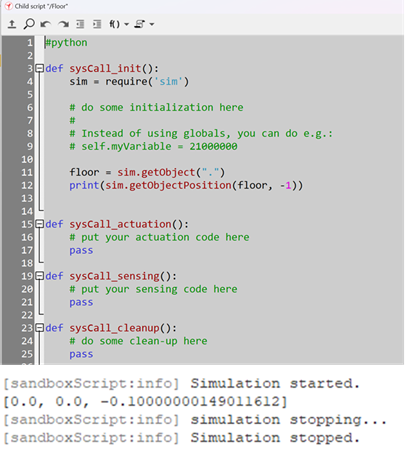
为什么 Z 轴值是 -0.1?
在 CoppeliaSim 里,默认地面 (Floor) 通常不是在 z = 0,而是位于 z = -0.1。这可能是为了避免浮动误差或保证物体接触地面时的稳定性。
如果你想让地面在 z = 0,可以手动修改地面的 Z 轴位置,例如:
sim.setObjectPosition(floor, -1, [0, 0, 0])
Pybullet 环境配置 ¶
查看 Matlab 支持的 Python 版本
Versions of Python Compatible with MATLAB Products by Release - MATLAB & Simulink
maltab 与 pybullet 联合仿真 - _ 夜尘 - 博客园
pybullet 学习(一)——安装与入门 pybullet-CSDN 博客
PyBullet 笔记(一)pybullet 及其依赖项的安装、pybullet 初探 - 知乎
pip install pybullet
由于 pybullet 中一些开箱即用的模型是通过 tensorflow 实现的,所以 tensorflow 也需要装一下:
pip install tensorflow
pybullet 的官方也提供了一些好玩的 demo,不过这些 demo 需要额外下载,先进入 windows 下一个你想要安放这些 baselines 的目录,然后输入:
git clone https://github.com/openai/baselines.git
cd baselines
pip install -e .