09 | 实验 —— 机械臂仿真与实验 ¶
约 3715 个字 239 行代码 预计阅读时间 17 分钟
实验要求 ¶
地点:石虎山基地 时间:春 4- 春 7 周
课程安排
- 第一周:仿真 - 机械臂正逆运动学求解
- 第二周:仿真 - 机械臂轨迹规划
- 第三周:实物 - 机械臂抓取与放置实验
实验器材
- ZJU-I 型桌面机械臂
- 机器人关节模组
- CoppeliaSim
- Python、Matlab
Coppeliasim¶
环境配置 ¶
打开文件
- Windows:
C:\Users\<username>\AppData\Roaming\CoppeliaSim\usrset.txt - MacOS:
/Users/<username>/.CoppeliaSim/usrset.txt
将default Python项修改为所安装 Python 的路径(确保与 1 中的 python 一致) 注
找 python 路径的方法 Python:
python的安装路径\python.exeAnaconda:anaconda的安装路径\envs\env_name\python.exe
conda create -n robot python=3.10
conda activate robot
| 查询 python 位置 | |
|---|---|
1 | |
pip install pyzmq
pip install cbor
仿真环境验证
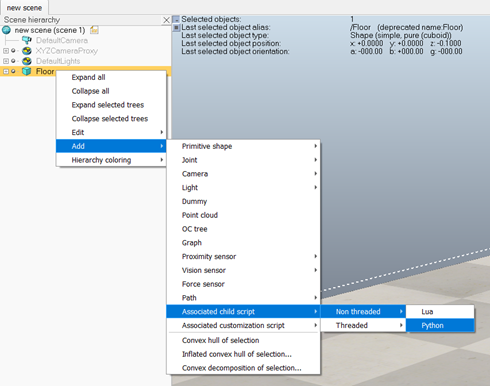
完成上述仿真环境配置后,进入 Coppeliasim 软件,右键new scene中的Floor,选择Add -> Associated child script -> Non Threaded -> Python
函数sysCall_init()中键入代码
floor = sim.getObject(".") # 获取当前场景中的 . 对象,"." 代表的是 当前对象,如果是在主脚本里运行,通常指的是整个场景的地面 (floor)
print(sim.getObjectPosition(floor, -1)) # 获取 floor 相对于 世界坐标系(-1 代表世界坐标系)的位置信息,返回的是 [x, y, z] 坐标。
运行并得到在控制台得到结果
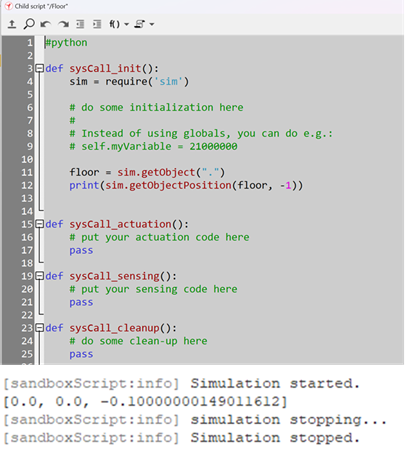
为什么 Z 轴值是 -0.1?
在 CoppeliaSim 里,默认地面 (Floor) 通常不是在 z = 0,而是位于 z = -0.1。这可能是为了避免浮动误差或保证物体接触地面时的稳定性。
如果你想让地面在 z = 0,可以手动修改地面的 Z 轴位置,例如:
sim.setObjectPosition(floor, -1, [0, 0, 0])
快捷键 ¶
CTRL+<space>:开始 / 停止模拟CTRL+E:在 1)普通,2)对象平移和 3)对象旋转鼠标模式之间切换CTRL+D:打开对象属性对话框CTRL+G:打开计算模块对话框CTRL+B:调整视图以适合选定的对象;如果未选择任何对象,则调整整个场景。 重点需要放在视图上。CTRL+ALT+C:将焦点放在 Lua 命令行控制栏上CTRL+L:清除状态栏(当焦点在 Lua 命令行控制栏上时)
代码框架入门 - 例程讲解 ¶
代码框架 ¶
双击 icon 可以打开代码
仿真中单位为米
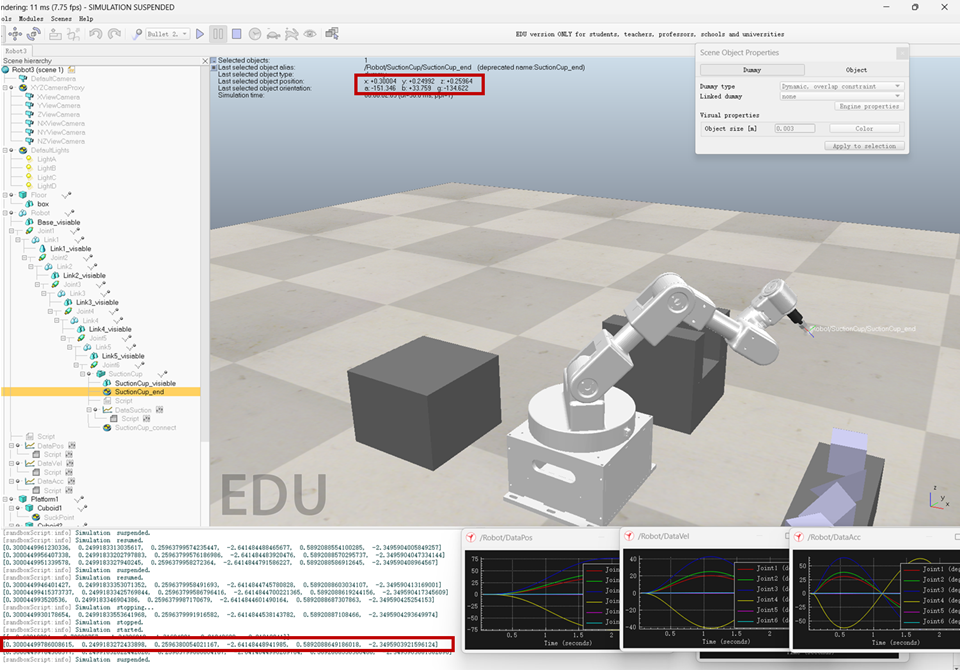
- Robot 中
SuctionCup_end点展示的为机械臂末端的坐标点(仿真中为 Dummy) ,通过选中坐标点可以在左上角查看位姿信息(其中角度为欧拉角X-Y’-Z’) 。PS:调用 API 得到的姿态信息为四元数,请注意转换。 Platform1为搬运起点的平台,其中四个物块的SuckPoint为吸盘的吸附中心点;Platform2为搬运终点的平台,其中PlacePoint为物块放置中心点;Pond为染色池,Start和End分别为起点和终点位置。PS:以上均只对位置进行了规定,但由于误差的存在,建议在规划时留一定的余量。- 吸盘的吸附条件:吸盘与吸附中心点的 Z 轴夹角应小于 \(5^{\circ}\),吸附位置应在吸附中心点为圆心、半径为 0.02m 的圆内,吸盘离物体的距离不能超过 0.005m。
- 在运行过程中、暂停时可以读取机械臂位置、速度、加速度和吸盘开关的状态,如下图所示。PS:停止会直接关闭。

图片来源于实验要求
Robot/Script.py¶
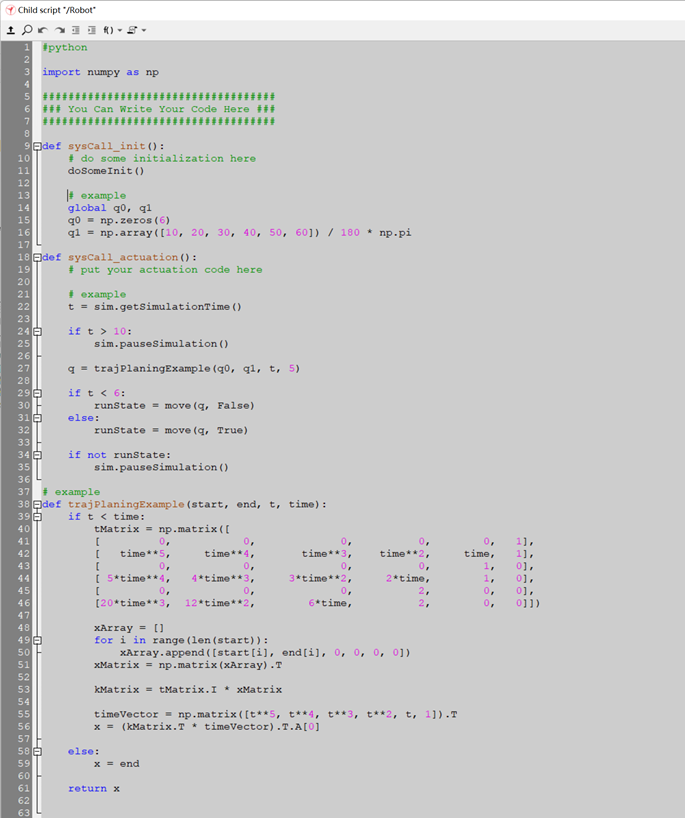
sysCall_init()完成各关节角的计算sysCall_actuation()中将规划好的关节角通过move(q, state)函数传输给机械臂。move(q, state):q: 机械臂各关节角度,数据类型6*1 ndarray,单位 rad;state,吸盘开关,数据类型bool。- 返回值:运行成功与否,数据类型
bool。
if t < 5.2:
q = trajPlaningDemo(self.q0, self.q1, t, 5) # return the joint angles at time t
state = False # vacumm gripper is off
# vacumm gripper takes effect from t=5.2s to 5.5s
elif t < 5.5:
q = self.q1 # keeps the robot still at q1
state = True # vacumm gripper is on
# lift a block and move to q2
elif t < 8.7:
q = trajPlaningDemo(self.q1, self.q2, t-5.5, 3)
state = True
# release the vaccum gripper
elif t < 9:
q = self.q2
state = False
else:
# robot moves from q2 to q0 within 5s
q = trajPlaningDemo(self.q2, self.q0, t-9, 5)
state = False
| 时间 ( 秒 ) | 任务描述 | 夹持器状态 |
|---|---|---|
| 0 - 5.2 | 机器人从 q0 移动到 q1 |
❌ 关闭 |
| 5.2 - 5.5 | 机器人停留在 q1,夹持器启动 |
✅ 开启 |
| 5.5 - 8.7 | 机器人从 q1 移动到 q2(搬运物体) |
✅ 开启 |
| 8.7 - 9 | 机器人停在 q2,夹持器关闭(释放物体) |
❌ 关闭 |
| 9 - 14 | 机器人从 q2 移动回 q0 |
❌ 关闭 |
| > 20 | 停止仿真 | ❌ 关闭 |
问题与解决 ¶
Traceback (most recent call last): UnicodeDecodeError: 'utf-8' codec can't decode byte 0xbb in position 27: invalid start byte
检查路径中是否有中文地址,改成英文
AttributeError: module 'IK' has no attribute 'IKSolver'
在.py文件的开头,修改正确的 IK 文件夹的位置
仿真实验 1:机械臂正、逆运动学求解 ¶
机械臂几何参数 ¶
每一轴的位置、速度、加速度约束(当前状态是各个关节零点)
| 关节一 | 关节二 | 关节三 | 关节四 | 关节五 | 关节六 | |
|---|---|---|---|---|---|---|
| 最小关节值 | \(-200^\circ\) | \(-90^\circ\) | \(-120^\circ\) | \(-150^\circ\) | \(-150^\circ\) | \(-180^\circ\) |
| 最大关节值 | \(200^\circ\) | \(90^\circ\) | \(120^\circ\) | \(150^\circ\) | \(150^\circ\) | \(180^\circ\) |
| 关节一 | 关节二 | 关节三 | 关节四 | 关节五 | 关节六 | |
|---|---|---|---|---|---|---|
| 关节速度 | \(100^\circ/s\) | \(100^\circ/s\) | \(100^\circ/s\) | \(100^\circ/s\) | \(100^\circ/s\) | \(100^\circ/s\) |
| 关节加速度 | \(500^\circ/s^2\) | \(500^\circ/s^2\) | \(500^\circ/s^2\) | \(500^\circ/s^2\) | \(500^\circ/s^2\) | \(500^\circ/s^2\) |
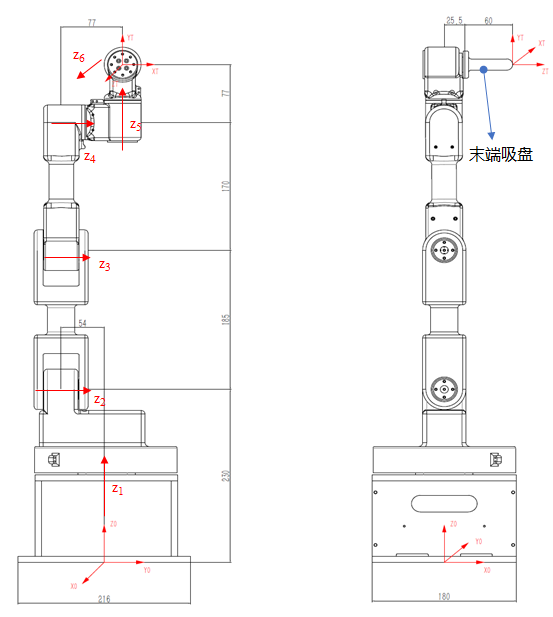
图源课程实验要求
实验要求 ¶
- 写出 ZJU-I 型桌面机械臂的 DH 参数;
- 写出 ZJU-I 型机械臂的正运动学解(不用给出最终的齐次变换矩阵的具体代数式
) ,并采用 \(XY'Z'\) 欧拉角表示末端执行器姿态; - 将以下 5 组关节角参数带入正运动学解,计算机械臂末端 Tip 点的空间位置,计算末端执行器的姿态,以 \(XY'Z'\) 欧拉角表示结果,写出计算过程;
- 第一组:\(\left(\frac{\pi}{6}, 0,\frac{\pi}{6}, 0, \frac{\pi}{3}, 0\right)\)
- 第二组:\(\left(\frac{\pi}{6}, \frac{\pi}{6}, \frac{\pi}{3}, 0,\frac{\pi}{3}, \frac{\pi}{6}\right)\)
- 第三组:\(\left(\frac{\pi}{2}, 0, \frac{\pi}{2}, -\frac{\pi}{3}, \frac{\pi}{3}, \frac{\pi}{6}\right)\)
- 第四组:\(\left(-\frac{\pi}{6}, -\frac{\pi}{6}, -\frac{\pi}{3}, 0, \frac{\pi}{12}, \frac{\pi}{2}\right)\)
- 第五组:\(\left(\frac{\pi}{12}, \frac{\pi}{12}, \frac{\pi}{12}, \frac{\pi}{12}, \frac{\pi}{12}, \frac{\pi}{12}\right)\)
- 将以上 5 组关节角分别输入仿真程序,将仿真得到的末端位姿与第 3 步得到的计算结果进行比对。
- 写出 ZJU-I 型桌面机械臂的逆运动学解析解(可选
) ; - 将如下 5 组末端位姿参数分别代入逆运动学解(可使用自带的逆运动学求解器进行相关计算
) ,计算对应的 5 组关节角;- 第一组:\((0.117,0.334,0.499,-2.019,-0.058, -2.190)\)
- 第二组:\((-0.066, 0.339, 0.444, -2.618, -0.524, -3.141)\)
- 第三组:\((0.3, 0.25, 0.26, -2.64, 0.59, -2.35)\)
- 第四组:\((0.42, 0, 0.36, 3.14, 1, -1.57)\)
- 第五组:\((0.32, -0.25, 0.16, 3, 0.265, -0.84)\)
- 将所求关节角作为参数输入仿真程序,从仿真中得到机械臂末端执行器的空间位置和姿态,与第 6 步给定的位置和姿态进行比对。
报告要求
机械臂正、逆运动学求解
1)ZJU-I型机械臂的DH参数
2)机械臂的正运动学及其仿真结果
3)机械臂的逆运动学及其仿真结果
最终提交文件,需包括
1)组号 - 实验报告.docx/pdf(推荐 pdf)
2)组号-代码文件.rar/zip:Coppeliasim仿真软件的.ttt文件及包含的其他代码文件
3)组号-仿真结果.mp4/mov/其他视频文件格式:机械臂轨迹规划仿真实验的录屏文件(文件大小应小于50Mb,推荐使用Win+G中的“捕获”进行录制)
DH 参数 ¶
| \(\alpha\) | \(a\) | \(d\) | \(\theta\) | |
|---|---|---|---|---|
| 1 | 0 | 0 | 0.23 | \(\theta_1\) |
| 2 | \(-\pi/2\) | 0 | -0.054 | \(\theta_2-\pi/2\) |
| 3 | 0 | 0.185 | 0 | \(\theta_3\) |
| 4 | 0 | 0.170 | 0.077 | \(\theta_4+\pi/2\) |
| 5 | \(\pi/2\) | 0 | 0.077 | \(\theta_5+\pi/2\) |
| 6 | \(\pi/2\) | 0 | 0.0855 | \(\theta_6\) |
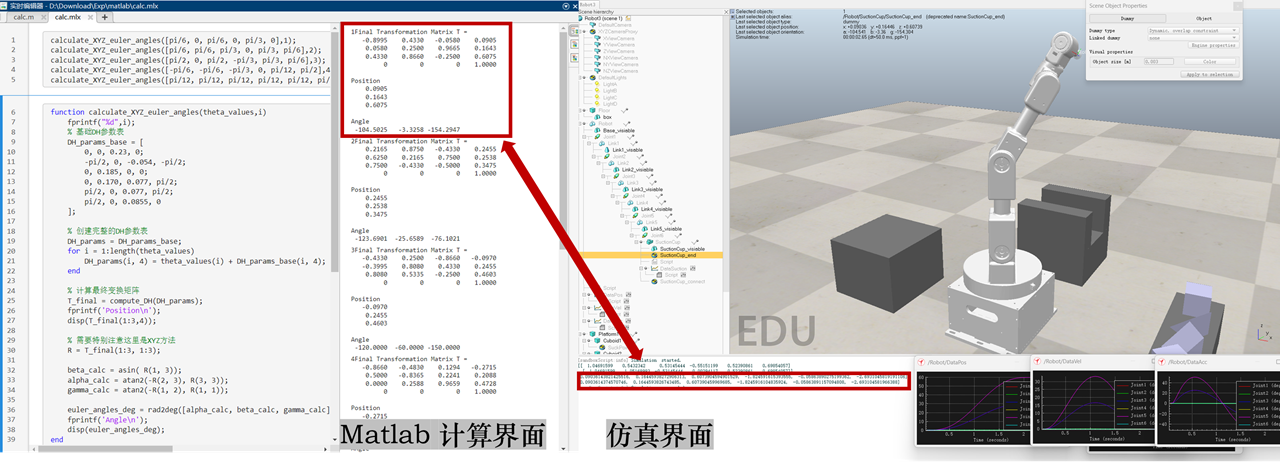
正运动学 ¶
任务在要求干什么
- 在仿真软件中,输入要求的关节角,从起始位置运动到这个要求的位置
- 通过手算 /matlab/python,计算出末端执行器最后的变换矩阵
- 将计算出的末端执行器的位置和姿态与仿真软件中的结果进行比对
仿真软件执行
| 仿真软件当中执行的代码 | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 | |
解算变换矩阵,计算末端参数
需要特别注意的点:
- 注意 DH 参数表当中的单位,图片中的单位是毫米,软件当中是米
- 注意 \(\theta\) 的初始值,需要保证 \(\theta_i = 0\) 时候,机械臂初始位姿正确 (\(\pm\frac{\pi}{2}\) 的原因 )
- 需要特别注意最后的欧拉角表示是 XYZ 表示方法,所以由旋转矩阵计算欧拉角的时候需要注意更换一下公式;
| 使用 Matlab 计算变换矩阵 | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 | |
| 计算变换矩阵 | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 | |
对比得到结果
逆运动学 ¶
这里使用IK库即可求解基础解
但是需要注意的是,关节角度有限制,所以需要将不符合关节角度限制的解去除。这里使用了np.all函数加上逻辑表达式进行判断,简化了逻辑判断
步骤:
- 使用逆运动学求解器得到解(可能有多个,按照要求选择一个)
- 将解带入正运动学
- 观察末端坐标和原先给定坐标是否一致
| 逆运动学求解与验证 | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 | |
可以看到红框的部分是一致的,可以验证了逆运动学的正确性
仿真实验 2 :机械臂点到点轨迹规划 ¶
通过控制机械臂关节运动,将机械臂末端执行器从起点在规定时间内运动到终点
注意各个关节轴的位置、速度、加速度限制,若超出限制将会停止运行!!!
不限制规划方案,但是需要注意,最终的成绩与机械臂运行合理性、关节轴速度和加速度连续性等相关。
要求:
- 起点位姿 \((0.117,0.334,0.499,-2.019,-0.058,-2.190)\)
- 终点位姿 \((0.32,-0.25,0.16,3,0.265,-0.84)\)
- 初始速度:0;终点速度:0;运行时间:2 秒
报告要求
机械臂轨迹规划,具体需包括
1)仿真实验整体方案介绍
2)机械臂的轨迹规划方案
3)轨迹规划仿真结果(视频)
最终提交文件,需包括
1)组号 - 实验报告.docx/pdf(推荐 pdf)
2)组号-代码文件.rar/zip:Coppeliasim仿真软件的.ttt文件及包含的其他代码文件
3)组号-仿真结果.mp4/mov/其他视频文件格式:机械臂轨迹规划仿真实验的录屏文件(文件大小应小于50Mb,推荐使用Win+G中的“捕获”进行录制)
实物实验 1:六自由度机械臂物体抓取与放置实验 ¶
- 编写程序控制 ZJU-I 型机械臂,实现木块抓取与搬运,具体流程为:
- 机械臂从零位置启动,运行至起始区域;
- 启动真空吸爪,抓取起始区域内的木块,移动至 A 点 \((370,-90,115)\);
- 移动过程中控制木块从 A 点沿直线路径运动至 B 点 \((288,-288,115)\);
- 控制从 B 点到达目标区域,目标区域位置为机械臂 1 号关节旋转角度 \(90^\circ\) 所在位置;
- 抓取第二个木块放置到目标区域,并堆叠在第一个模块上,二者姿态保持一致;
- 程序中需要编写正、逆运动学求解代码、轨迹规划代码,要求机械臂无碰撞、所有关节速度平滑;
- 分组完成实验,每组提交一份实验报告,内容不超过 4 页;
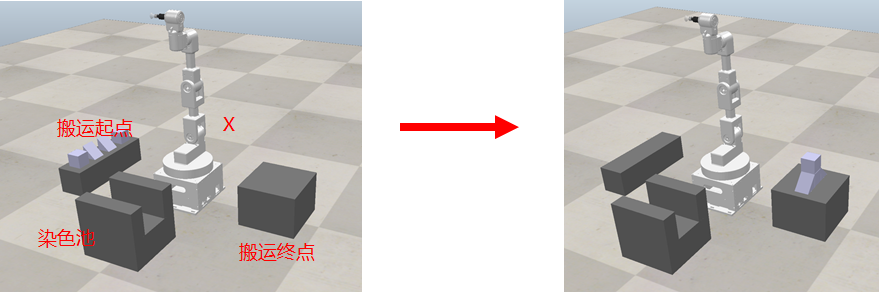
实验解释 ¶
说人话:这个实验在干什么
- 需要找到一个没有坏的机械臂,很多组的都已经坏掉了
- 连接串口,运行老师给到的测试程序,看看能不能动
- 期望的现象:机械臂从起始位置运动到第一个物体,吸盘吸附物体,移动到 A 点,再直线移动到 B 点,再移动到目标区域,放下物体
- B 点的操作是类似的
遇到的问题与解决方法:
- 连接不上机械臂:
- 解决方法:检查串口是否正确,USB线是否连接好,电源是否打开;红色紧急停止按钮不要旋下去
- mac当中需要使用
ls /dev/tty.*来查看串口,注意权限问题;但是老师也没有提供arm架构下的库文件,所以只有intel架构的mac才能做这个实验
例程解释 ¶
例程中主要给了两组函数,分别实现使用五次多项式规划两点之间轨迹和三点之间轨迹的规划(可以指定中间点的位置和速度
quinticCurvePlanning(startPosition, endPosition, time)¶
# 返回值kArray为多项式系数
def quinticCurvePlanning(startPosition, endPosition, time):
timeMatrix = np.matrix([
[ 0, 0, 0, 0, 0, 1],
[ time**5, time**4, time**3, time**2, time, 1],
[ 0, 0, 0, 0, 1, 0],
[ 5*time**4, 4*time**3, 3*time**2, 2*time, 1, 0],
[ 0, 0, 0, 2, 0, 0],
[20*time**3, 12*time**2, 6*time, 2, 0, 0]
])
invTimeMatrix = np.linalg.inv(timeMatrix)
kArray = []
for i in range(len(startPosition)):
X = np.matrix([startPosition[i], endPosition[i], 0, 0, 0, 0]).T
k = np.dot(invTimeMatrix, X)
kArray.append(k)
return kArray
- 作用: 计算两点间五次多项式轨迹的系数。
- 输入:
startPosition: 起始位置数组。endPosition: 终止位置数组。time: 运动时间。
- 输出: 多项式系数数组
kArray。 - 原理: 构造时间矩阵,求逆矩阵,计算多项式系数。
quinticCurveExcute(kArray, time)¶
- 作用: 根据五次多项式系数和时间计算关节位置。
- 输入:
kArray: 多项式系数数组。time: 当前时间。
- 输出: 当前关节位置数组
jointPositions。 - 原理: 将时间代入多项式计算关节位置。
def quinticCurveExcute(kArray, time):
timeVector = np.matrix([time**5, time**4, time**3, time**2, time, 1]).T
jointPositions = []
for i in range(6):
jointPosition = np.dot(kArray[i].T, timeVector)
jointPositions.append(jointPosition[0, 0])
return np.array(jointPositions)
quinticCurvePlanning2(...)¶
- 作用: 计算三点间五次多项式轨迹的系数。
- 输入:
startPosition: 起始位置数组。middlePosition: 中间位置数组。endPosition: 终止位置数组。midVel: 中间点速度。time: 起点到中间点时间。time1: 起点到终点时间。
- 输出: 多项式系数数组
kArray。 - 原理: 构造时间矩阵,求逆矩阵,计算多项式系数。
# 返回值kArray为多项式系数,其中起点终点速度均为零,中间点速度可以规划,为入参midVel
# 其中time为起点到中间点的运动时间,time1为起始点到终点的运动时间(即整段规划的运动时间)
def quinticCurvePlanning2(startPosition, middlePosition, endPosition, midVel, time, time1):
timeMatrix = np.matrix([
[ 0, 0, 0, 0, 0, 1],
[ time**5, time**4, time**3, time**2, time, 1],
[ time1**5, time1**4, time1**3, time1**2, time1, 1],
[ 0, 0, 0, 0, 1, 0],
[ 5*time**4, 4*time**3, 3*time**2, 2*time, 1, 0],
[ 5*time1**4, 4*time1**3, 3*time1**2, 2*time1, 1, 0],
])
invTimeMatrix = np.linalg.inv(timeMatrix)
kArray = []
for i in range(len(startPosition)):
X = np.matrix([startPosition[i], middlePosition[i], endPosition[i], 0, midVel, 0]).T
k = np.dot(invTimeMatrix, X)
kArray.append(k)
return kArray
quinticCurveExcute2(kArray, time)¶
def quinticCurveExcute2(kArray, time):
timeVector = np.matrix([time**5, time**4, time**3, time**2, time, 1]).T
jointPositions = []
for i in range(6):
jointPosition = np.dot(kArray[i].T, timeVector)
jointPositions.append(jointPosition[0, 0])
return np.array(jointPositions)
- 作用: 根据三点间五次多项式系数和时间计算关节位置。
- 输入:
kArray: 多项式系数数组。time: 当前时间。
- 输出: 当前关节位置数组
jointPositions。 - 原理: 将时间代入多项式计算关节位置。
一些需要注意的点 ¶
- 起始点是需要自己确定的,我自己选的是和 A 点 x 相同,y 大一些的两个点
- 旋转 90 度的坐标位置可以通过简单的全等三角形知识得出
- 需要注意坐标系当中的单位问题,之前实验中的单位是米,这里是毫米
- 贵重物品最好远离机械臂,避免代码中的 bug 导致机械臂突然发疯
求解代码 ¶
# from Robot.Robot import Robot
import numpy as np
import until
import time
from until import InverseKinamatics
import math
def go(r, runtime, *k_list):
T, t, flag = 0.02, 0, 0
r.go_home()
while t < runtime[-1]:
start = time.time()
for i, k in enumerate(k_list):
if runtime[i] <= t < runtime[i + 1]:
if i == 1 and not flag:
time.sleep(2)
flag = 1
if i == 3:
q = until.quinticCurveExcute2(k, t - runtime[i])
else:
q = until.quinticCurveExcute(k, t - runtime[i])
break
else:
time.sleep(2)
r.go_home()
break
r.syncMove(np.reshape(q, (6, 1)))
t += T
time.sleep(max(0, T - (time.time() - start)))
| 获取坐标点 | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | |
def move():
# com: Windows: "COM3" Linux: "/dev/ttyUSB0" Mac: "/dev/tty.usbserial-*"
r = Robot(com='COM9', baud=250000)
r.connect()
q0, object_1, P_A_1, P_B_1, helper_1,end_1, object_2, P_A_2, P_B_2, helper_2,end_2 = get_position()
t1 = [2,3,2,4]
runtime = [sum(t1[:i+1]) for i in range(len(t1))]
# 抓取第一个物体
k_0 = until.quinticCurvePlanning(q0,object_1,t1[0])
k_1 = until.quinticCurvePlanning(object_1,P_A_1,t1[1])
k_2 = until.quinticCurvePlanning(P_A_1,P_B_1,t1[2])
k_3 = until.quinticCurvePlanning2(P_B_1,helper_1,end_1,t1[3]*0.45,t1[3]) # 经过中间点的轨迹规划
go(r,runtime,k_0,k_1,k_2,k_3)
# 抓取第二个物体
k_0 = until.quinticCurvePlanning(q0,object_2,t1[0])
k_1 = until.quinticCurvePlanning(object_2,P_A_2,t1[1])
k_2 = until.quinticCurvePlanning(P_A_2,P_B_2,t1[2])
k_3 = until.quinticCurvePlanning2(P_B_2,helper_2,end_2,t1[3]*0.45,t1[3])
go(r,runtime,k_0,k_1,k_2,k_3) # 经过中间点的轨迹规划
if __name__ == '__main__':
move()
Explore¶
Pybullet 环境配置 ¶
查看 Matlab 支持的 Python 版本
Versions of Python Compatible with MATLAB Products by Release - MATLAB & Simulink
maltab 与 pybullet 联合仿真 - _ 夜尘 - 博客园
pybullet 学习(一)——安装与入门 pybullet-CSDN 博客
PyBullet 笔记(一)pybullet 及其依赖项的安装、pybullet 初探 - 知乎
pip install pybullet
由于 pybullet 中一些开箱即用的模型是通过 tensorflow 实现的,所以 tensorflow 也需要装一下:
pip install tensorflow
pybullet 的官方也提供了一些好玩的 demo,不过这些 demo 需要额外下载,先进入 windows 下一个你想要安放这些 baselines 的目录,然后输入:
git clone https://github.com/openai/baselines.git
cd baselines
pip install -e .