05 | 轨迹规划 ¶
约 2333 个字 106 行代码 预计阅读时间 10 分钟
(Trajectory Planning) 为每个关节计算连续的运动轨迹,使末端执行器在空间中从点A移动到点B
| 特性 | 关节空间规划 | 笛卡尔空间规划 |
|---|---|---|
| 定义 | 在关节空间中规划每个关节的运动轨迹,使末端执行器达到目标位置。 | 在笛卡尔空间中直接规划末端执行器的运动轨迹。 |
| 优点 | - 计算简单,适合大多数机器人控制器。 | - 轨迹直观,便于控制末端执行器的运动路径。 |
| 缺点 | - 末端执行器的路径可能不直观,可能出现不必要的绕行。 | - 计算复杂,可能需要逆运动学求解,增加计算负担。 |
| 适用场景 | - 对路径形状要求不高的任务,例如点到点的运动。 | - 对路径形状有严格要求的任务,例如绘图或焊接。 |
| 插值方法 | - 直接对关节角度进行插值。 | - 需要对末端位置或姿态进行插值,可能涉及旋转矩阵或四元数的处理。 |
| 运动平滑性 | - 关节运动平滑,但末端执行器路径可能不平滑。 | - 末端执行器路径平滑,但可能导致关节运动不平滑。 |
关节空间规划 ¶
| 方法 | 平滑性 | 计算复杂度 | 加速度连续性 | 适用场景 |
|---|---|---|---|---|
| 线性插值 | 低(速度突变) | 低 | 不连续 | 简单、低速 |
| 抛物线过渡 | 中(速度连续) | 中 | 不连续 | 中等速度,允许加速度突变 |
| 分段三次多项式 | 高(速度 / 加速度连续) | 中高 | 连续 | 平滑加减速的中高速运动 |
| 五次多项式 | 极高(全局连续) | 高 | 连续 | 高精度、高动态性能需求 |
线性插值 ¶
线性插值是一种简单的轨迹规划方法,通过在起点和终点之间进行线性插值来计算中间点的位置。其公式如下:
其中:
- \(\phi_0\) 为起始位置,
- \(\phi_f\) 为终止位置,
- \(t\) 为当前时间,
- \(T\) 为总时间。
线性插值的优点是计算简单,适用于对路径平滑性要求不高的场景,但其缺点是速度和加速度可能会出现突变。
import numpy as np
def linear_interpolation(start, end, t, duration):
"""
线性插值轨迹规划
:param start: 起始点坐标
:param end: 终点坐标
:param t: 当前时间
:param duration: 总时长
:return: 当前时刻的位置
"""
if t < duration:
x_array = start * (1 - t / duration) + end * (t / duration)
x_angles = inverse_kinematics(x_array)
else:
x_angles = inverse_kinematics(end)
return x_angles
三次多项式:规划位置 & 速度 ¶
这里有四个未知数,所以需要四个约束条件,选择初始位置、初始速度、终止位置、终止速度(一般都是给定的)
用给定的数据求解方程,得到四个系数,然后就可以得到轨迹方程。
三次 + 中间点 ¶
指定中间点速度
每一段都使用三次多项式进行规划。
- 前后两段斜率符号相同:速度取平均值
- 前后两段斜率符号不同:速度取 0
不指定中间点速度
有八个未知数,所以需要八个约束条件,一种方式是
- 位置约束:第一段起点终点,第二段起点终点
- 速度约束:第一段起点速度,第二段终点速度,中间点速度相等
- 加速度联系约束:中间点加速度相等
def cubic_spline(start, end, t, duration):
"""
分段三次多项式插值
:param start: 起始点坐标
:param end: 终点坐标
:param t: 当前时间
:param duration: 总时长
:return: 当前时刻的位置
"""
if t < duration:
tx = t / duration
if t < 0.25 * duration:
tx = 32 / 6 * (tx ** 3)
elif t < 0.5 * duration:
tx = -32 / 6 * (tx - 0.25) ** 3 + 4 * (tx - 0.25) ** 2 + tx - 0.25 + 1 / 12
elif t < 0.75 * duration:
tx = -32 / 6 * (tx - 0.5) ** 3 + 2 * (tx - 0.5) + 0.5
else:
tx = 32 / 6 * (tx - 0.75) ** 3 - 4 * (tx - 0.75) ** 2 + (tx - 0.75) + 11 / 12
x_array = start * (1 - tx) + end * tx
x_angles = inverse_kinematics(x_array)
else:
x_angles = inverse_kinematics(end)
return x_angles
五次多项式:规划位置 & 速度 & 加速度 ¶
思路比较类似。
六个未知数 , 就可以指定起点终点的位置、速度、加速度,然后求解方程。
def quintic_polynomial(start, end, t, duration):
"""
五次多项式轨迹规划
:param start: 起始点坐标
:param end: 终点坐标
:param t: 当前时间
:param duration: 总时长
:return: 当前时刻的位置
"""
if t < duration:
t_matrix = np.matrix([
[0, 0, 0, 0, 0, 1],
[duration ** 5, duration ** 4, duration ** 3, duration ** 2, duration, 1],
[0, 0, 0, 0, 1, 0],
[5 * duration ** 4, 4 * duration ** 3, 3 * duration ** 2, 2 * duration, 1, 0],
[0, 0, 0, 2, 0, 0],
[20 * duration ** 3, 12 * duration ** 2, 6 * duration, 2, 0, 0]
])
x_matrix = np.matrix([[start[i], end[i], 0, 0, 0, 0] for i in range(len(start))]).T
k_matrix = np.linalg.inv(t_matrix) @ x_matrix
time_vector = np.matrix([t ** 5, t ** 4, t ** 3, t ** 2, t, 1]).T
x = (k_matrix.T @ time_vector).T.A[0]
else:
x = end
return x
直线段 + 抛物线过渡 ¶
两段形状相同的抛物线,中间连接的直线段是公切线
- 过渡段:抛物线段
- 直线段:顾名思义
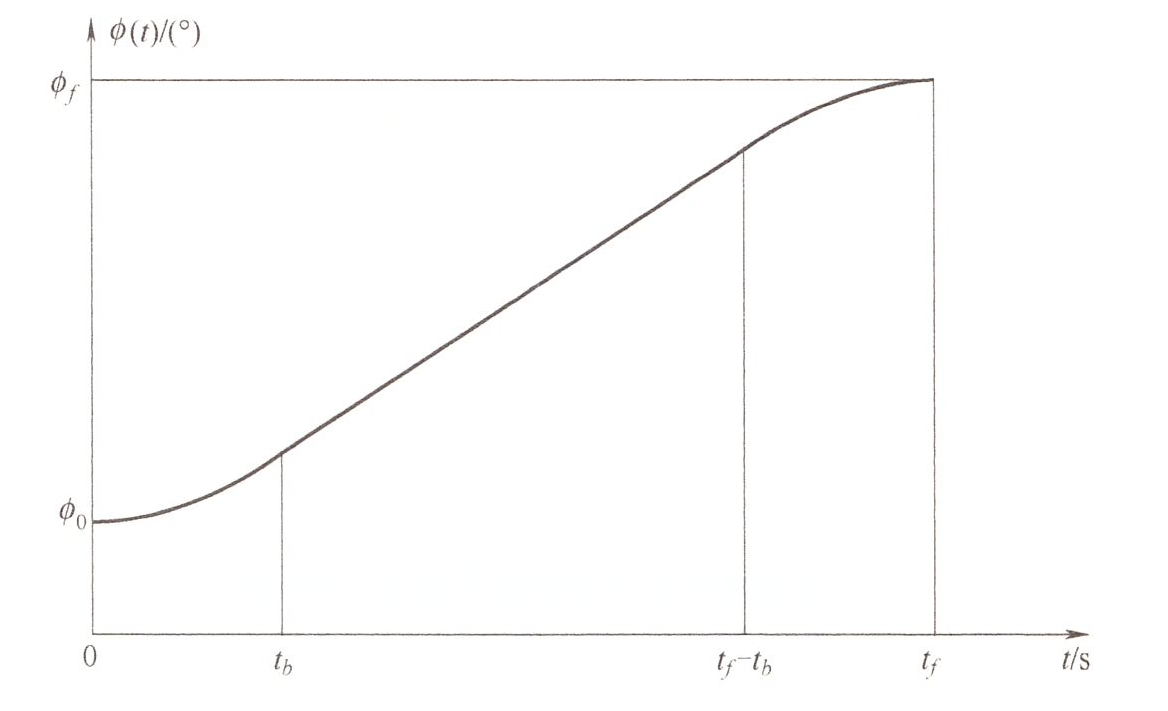
给定:起点 \(\phi_0\)、终点 \(\phi_{final}\)、总时间 \(t_{final}\)、加速度 \(\ddot\phi\) 需要求解:过渡时间(抛物线段)\(t_b\)、速度(直线段)\(k_b\)
过渡段的时间间隔,二次方程求根公式求解。舍掉 + 号的解是因为 \(t_b < t_{f}\)
这里相当于初速度为 0 的平抛
def parabolic_transition(start, end, t, duration):
"""
抛物线过渡插值
:param start: 起始点坐标
:param end: 终点坐标
:param t: 当前时间
:param duration: 总时长
:return: 当前时刻的位置
"""
if t < duration:
tx = t / duration
if t < 0.5 * duration:
tx = 2 * (tx ** 2)
else:
tx = 0.5 + 2 * (tx - 0.5) - 2 * (tx - 0.5) ** 2
x_array = start * (1 - tx) + end * tx
x_angles = inverse_kinematics(x_array)
else:
x_angles = inverse_kinematics(end)
return x_angles
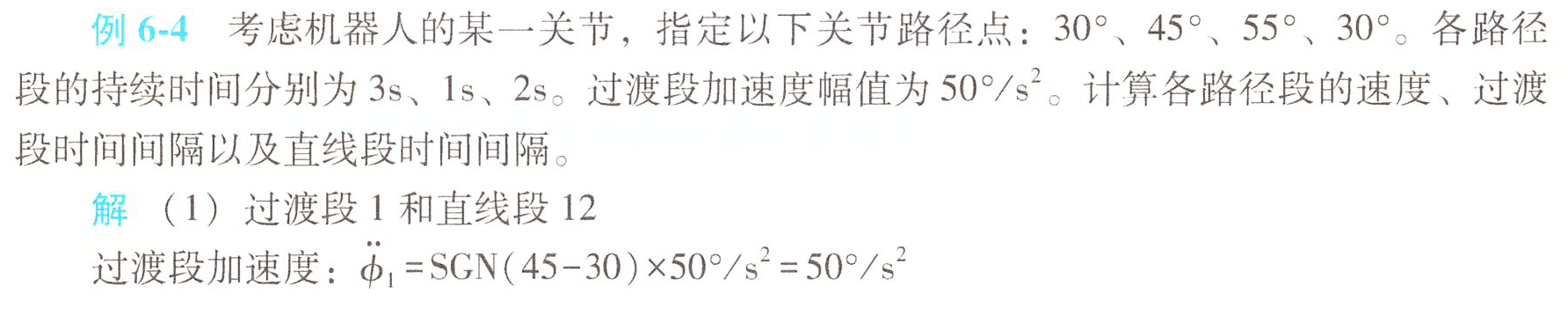
中间点 + 抛物线过渡 ¶
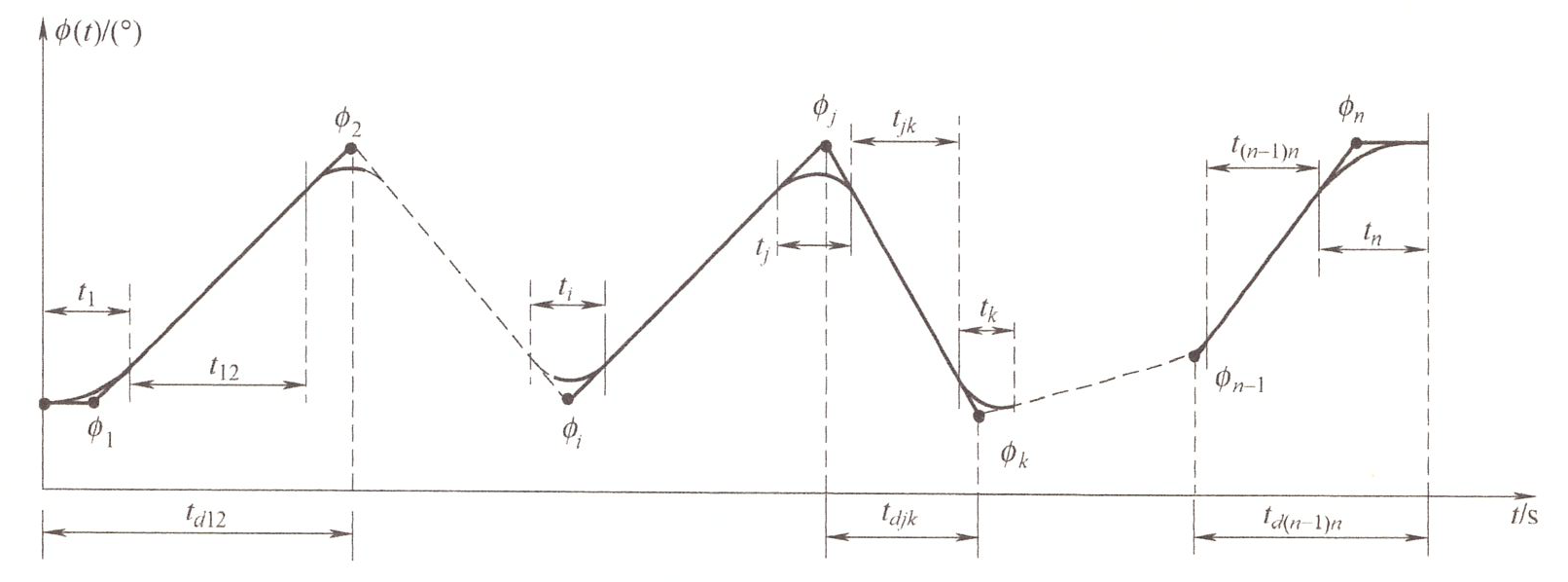
给定: 系列点 \(\phi_0, \phi_1,\dots,\phi_{final}\)、各段时间 \(t_{dij}\)、加速度 \(\ddot\phi\)
需要求解: 各段的速度 \(k_{ij}\),以及过渡段的时间 \(t_{i}\),直线段的时间 \(t_{ij}\)
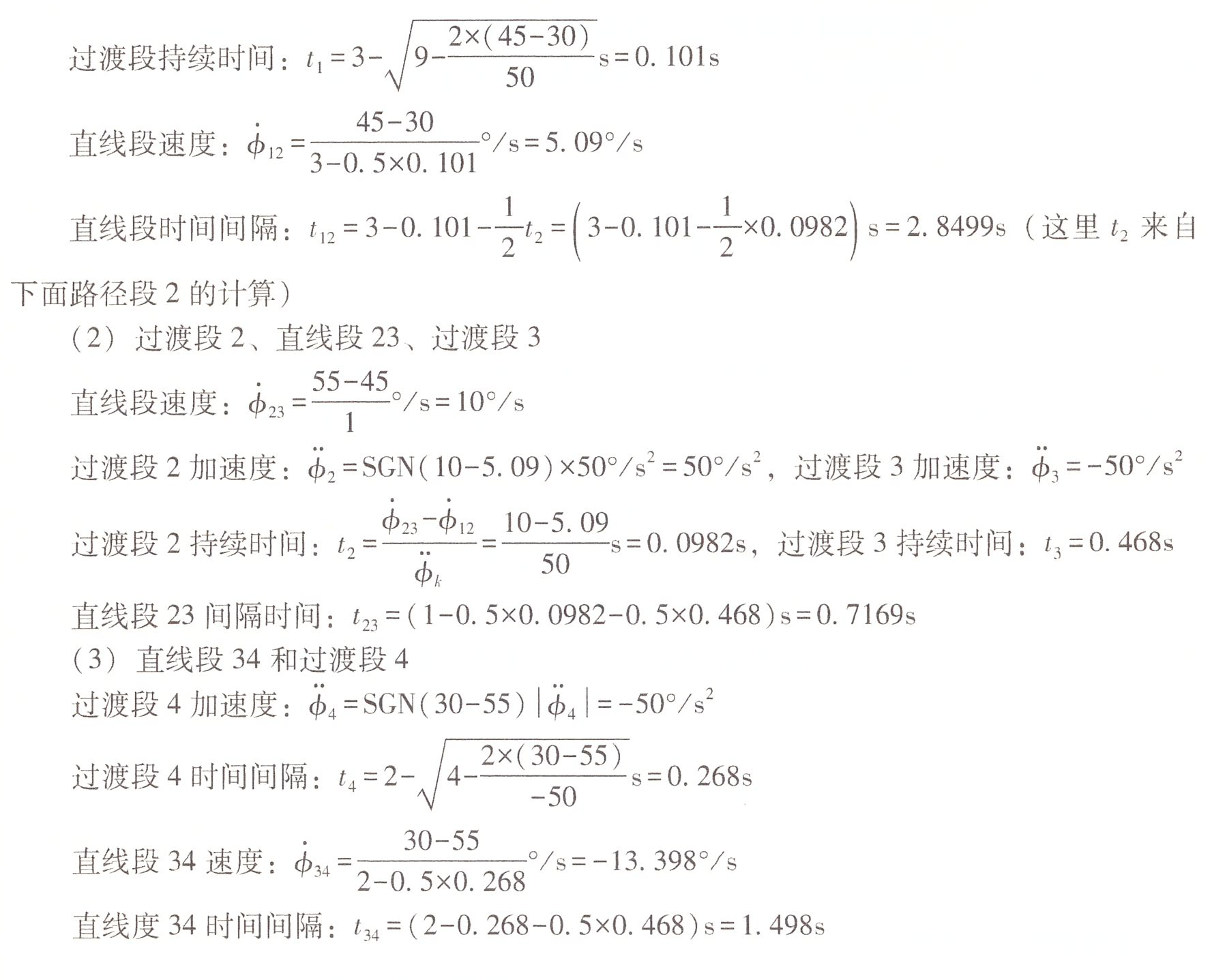
中间段计算 ¶
过渡段 \( j \) 加速度
过渡段 \( j \) 时间间隔
直线段 \( jk \) 速度
直线段时间 \( jk \) 间隔
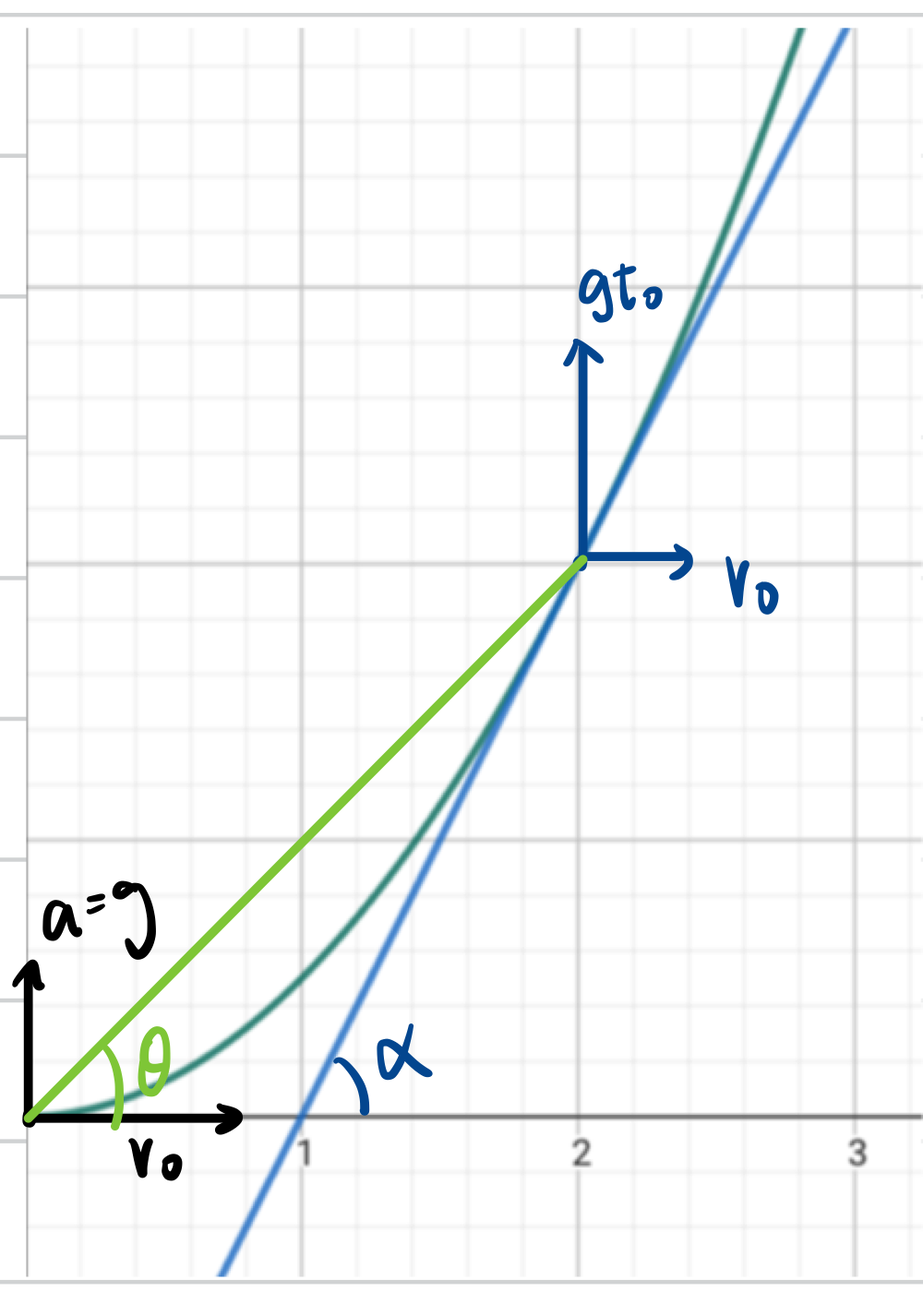
为什么是 \(\frac{1}{2}t\)
这里可以联想到高中平抛运动当中的知识,速度角和位置角有一个 \(\frac{1}{2}\) 的关系。
这个其实很容易推导:
- 速度角:\(\tan \alpha = \frac{v_y}{v_x}= \frac{g\cdot t}{v_0}\)
- 位置角:\(\tan \theta = \frac{y}{x} = \frac{\frac{1}{2}g\cdot t^2}{v_0\cdot t} = \frac{1}{2}\cdot \tan \alpha\)
也就是说,任意给定抛物线上的点,找到位移中点,连线即可得到速度方向
起始段计算 ¶
过渡段 1 加速度
过渡段 1 时间间隔
根据切点速度相等列写方程
求根公式解得:
直线段 12 速度
直线段 12 时间间隔
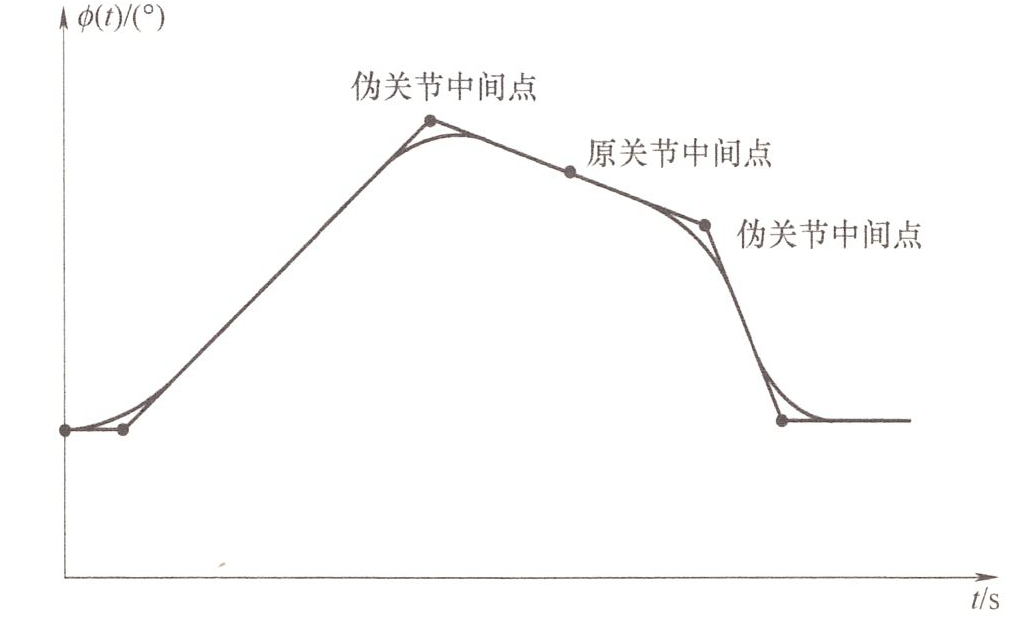
这里因为抛物线对轨迹进行了圆滑处理,相当于先用直线连接起来,再用抛物线做一个圆角,所以并不能真正到达对应的点
解决方案:设置两个伪关节,连线经过给定点,则可以保证经过给定点
笛卡尔空间规划 ¶
旋转矩阵和欧拉角不可以插值的原因:插值得到的 R 矩阵不一定属于 SO(3)
等效轴角插值 ¶
Slerp | 四元数球面线性插值 ¶
证明
\(S^3\) 中的单位四元数 \(\eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3\) 与 \(\mathrm{U}\) 中的欧拉参数 \((\eta, \varepsilon_1, \varepsilon_2, \varepsilon_3)^T\) 一一对应。考虑两个用欧拉参数(等价于用单位四元数)表示的不同姿态:
式中,\(\mathbf{r}_0 \neq \mathbf{r}_1\) 且 \(\mathbf{r}_0 \neq -\mathbf{r}_1\)。四元数插值的目的是找出中间姿态 \(\mathbf{r}_t\),\(t \in [0, 1]\)(注意这里的起止时间作了归一化
注意到 \(\|\mathbf{r}_0\| = \|\mathbf{r}_1\| = 1\)。
于是,两个欧拉参数的内积等于它们夹角的余弦值
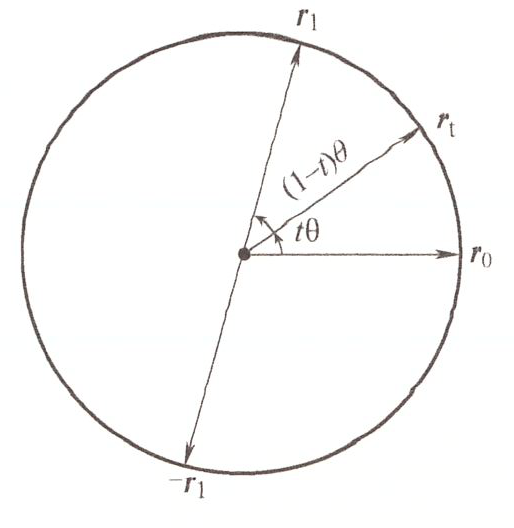
如图所示,将中间姿态 \(\mathbf{r}_t\) 限制在 \(\mathbf{r}_0\) 和 \(\mathbf{r}_1\) 确定的平面中并假设匀速旋转,可以使四元数插值问题化为一个简单的平面几何问题:\(\mathbf{r}_0\)、\(\mathbf{r}_1\) 和 \(\mathbf{r}_t\) 都在平面单位圆上,\(\mathbf{r}_t\) 从 \(\mathbf{r}_0\) 匀速旋转到 \(\mathbf{r}_1\)。
由于匀速旋转,对于 \(t \in [0, 1]\),\(\mathbf{r}_0\) 与 \(\mathbf{r}_t\) 的夹角是 \(t\theta\),\(\mathbf{r}_1\) 与 \(\mathbf{r}_t\) 的夹角是 \((1-t)\theta\),则由欧拉参数内积与夹角余弦值的关系,有
同时,\(\mathbf{r}_t\) 可以表示为 \(\mathbf{r}_0\) 和 \(\mathbf{r}_1\) 的线性组合,即
最后,求解线性方程组
联立两式,可求得
式中,\(\theta = \cos^{-1}(\mathbf{r}_0 \cdot \mathbf{r}_1)\)。
def slerp(q1, q2, t):
"""
球面线性插值(Slerp)
:param q1: 起始四元数
:param q2: 终止四元数
:param t: 插值因子,范围 [0, 1]
:return: 插值后的四元数
"""
dot_product = np.dot(q1, q2)
dot_product = np.clip(dot_product, -1.0, 1.0)
theta_0 = np.arccos(dot_product)
sin_theta_0 = np.sin(theta_0)
if sin_theta_0 < 1e-6:
return q1
theta = theta_0 * t
s1 = np.sin(theta) / sin_theta_0
s0 = np.cos(theta) - dot_product * s1
return s0 * q1 + s1 * q2
有约束的轨迹规划 ¶
避障 ¶
加速度 / 速度限制 ¶
题型 ¶
多项式参数计算:时间、速度 ¶


抛物线过渡计算 ¶