机器人导论 ¶
约 4772 个字 51 行代码 预计阅读时间 19 分钟
课程简介
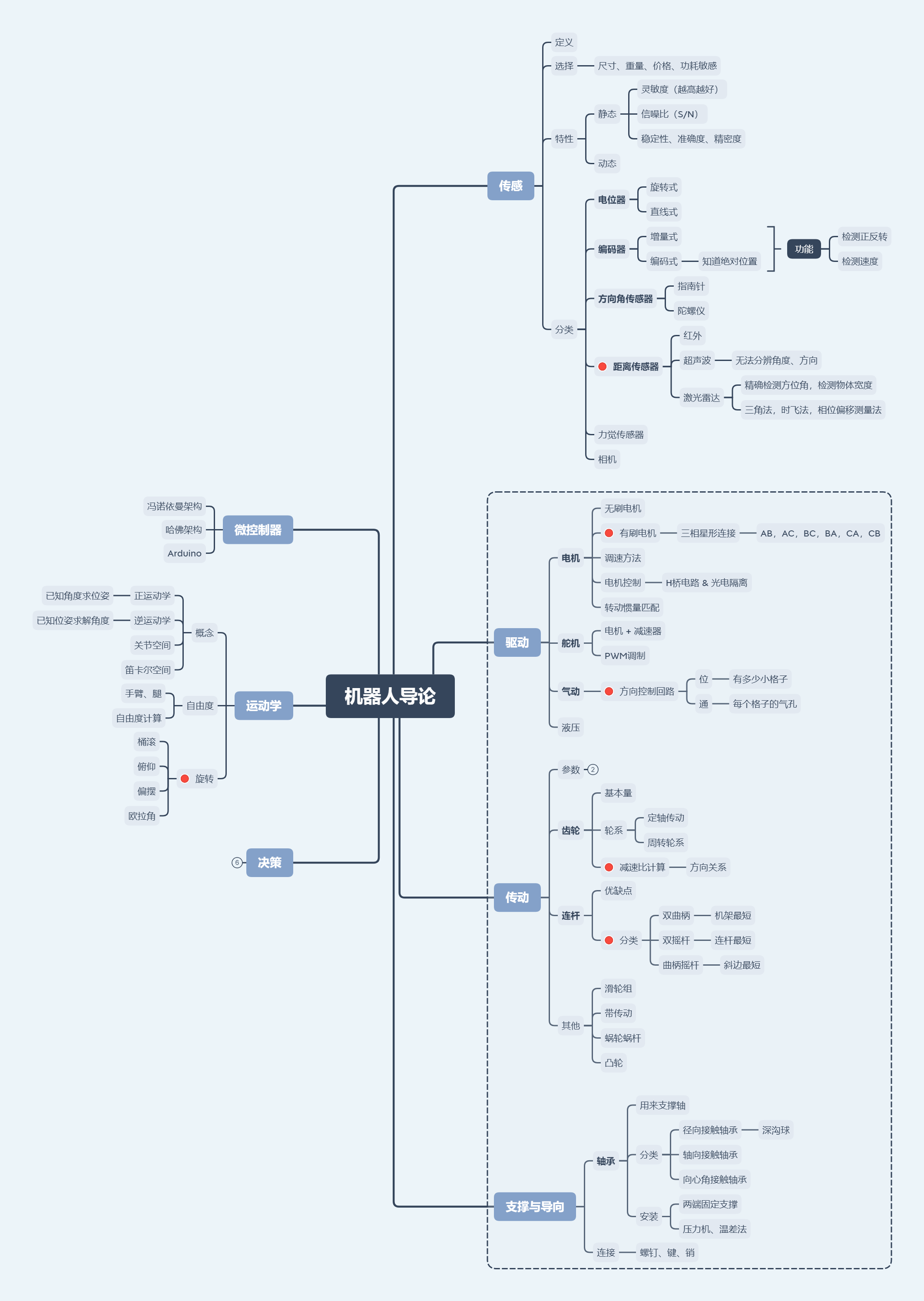
一、导论 ¶
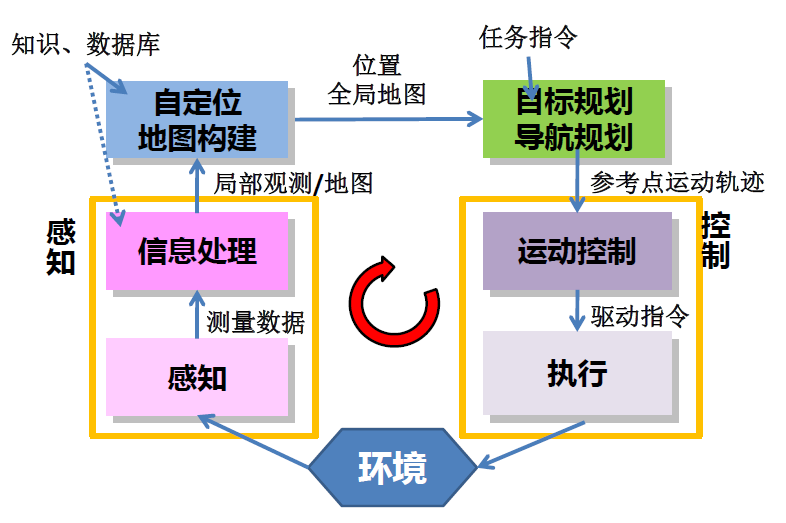
机器人具备的主要特征
- 运动
- 交互
- 感知
- 决策
设计的流程
- 明确执行机构
- 确定传动方式
- 设计导向机构
- 结构设计
- 优化分析
- 组装与测试
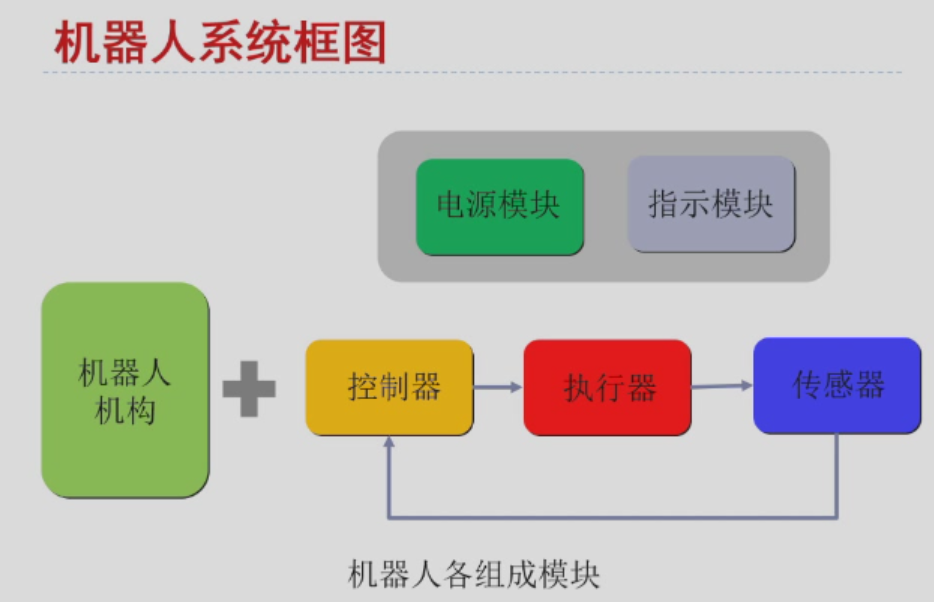
执行结构:完成操作任务
传动机构:伺服系统 如齿轮
支撑 / 导向机构:导向机构作用是支撑和导向,使运动能安全、准确地完成特定方向的运动。如:轴承和导轨
二、微控制器 ¶
总线 bus
GPIO : general purpose io
二进制减法: 用补码
二进制乘法: 移位相加 倍增

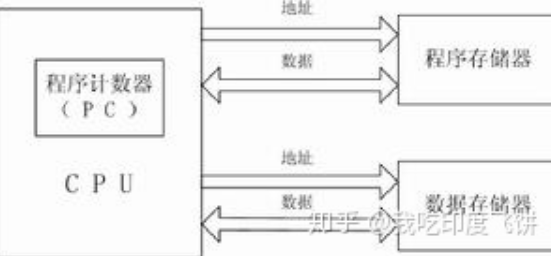
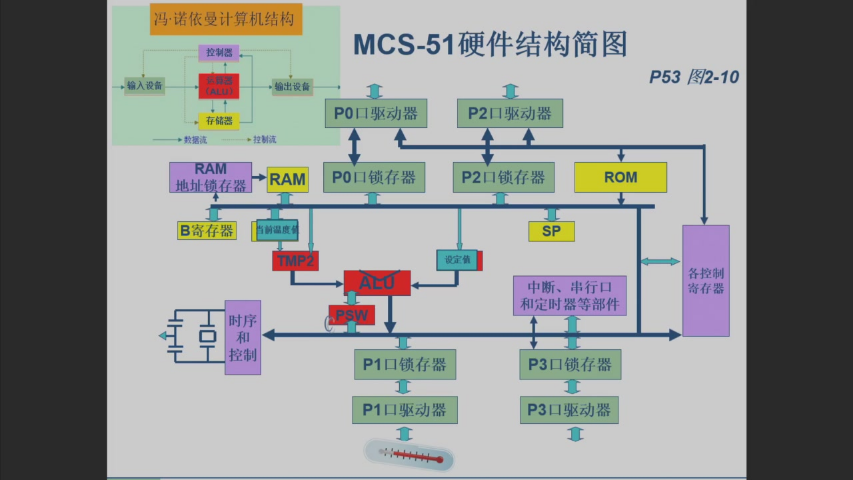
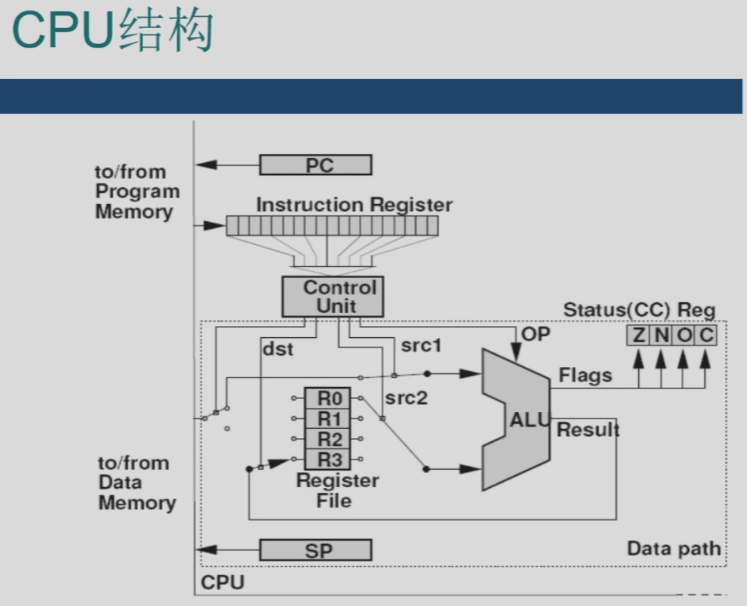
控制器:每一个箭头 决定开关是否打开
ALU : 逻辑计算
 嵌入式系统: 和硬件完全对应
嵌入式系统: 和硬件完全对应
 根据PID系统
根据PID系统
Arduino¶
主代码 ¶
//所有程序都写在下面两个函数里
/*开机的时候运行一次,各种设定放在setup()里*/
Void setup()
{
Serial.begin(9600);//设置波特率
}
/*不断循环*/
Void loop()
{
Serial.println("Hello world!");
delay(1000);//延迟1s
}
LED 灯闪烁 ¶
#define led 13
Void setup()
{
pinMode(led,OUTPUT); //设定led管脚为输出引脚
}
Void loop()
{
digitalWrite(led,HIGH); //设置led为高电平,点亮led
delay(1000);//延迟1s
digitalWrite(led,LOW); //设置led为低电平,熄灭led
delay(1000);//延迟1s
}
Question¶
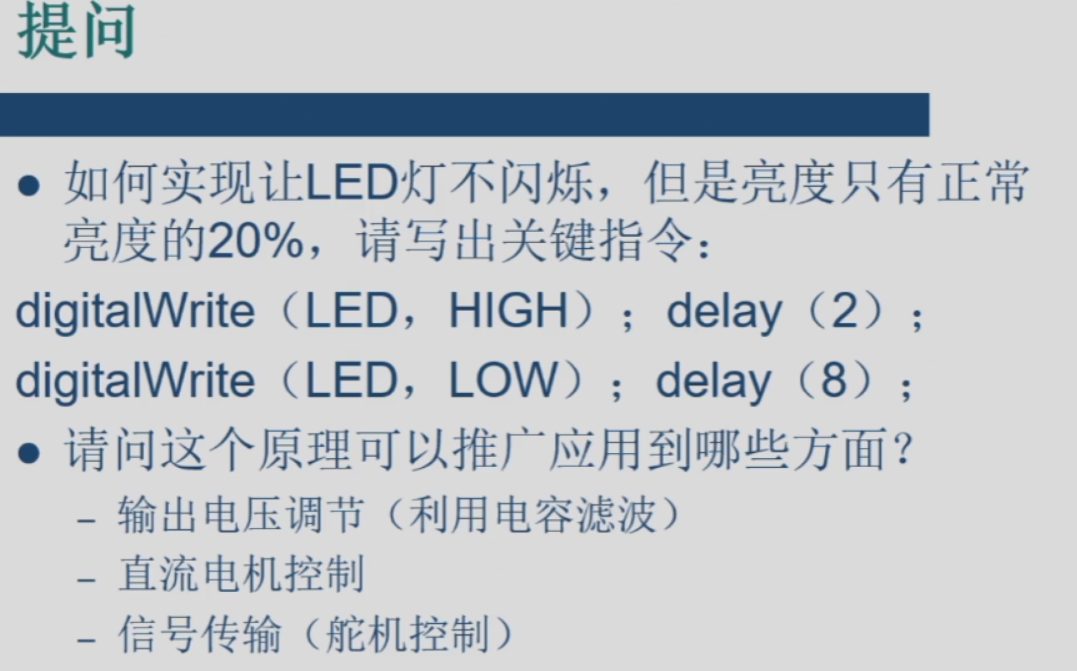
Q1:如何让 LED 不闪烁,但亮度只有正常的 20%?
原理:人眨眼的频率有限,当闪烁频率低时,会认为没有闪烁
#define led 13
Void setup()
{
pinMode(led,OUTPUT); //设定led管脚为输出引脚
}
Void loop()
{
digitalWrite(led,HIGH); //设置led为高电平,点亮led
delay(2);//延迟1s
digitalWrite(led,LOW); //设置led为低电平,熄灭led
delay(8);//延迟1s
}
Q2: 原理的推广
- 输出电压调节(利用电容滤波)
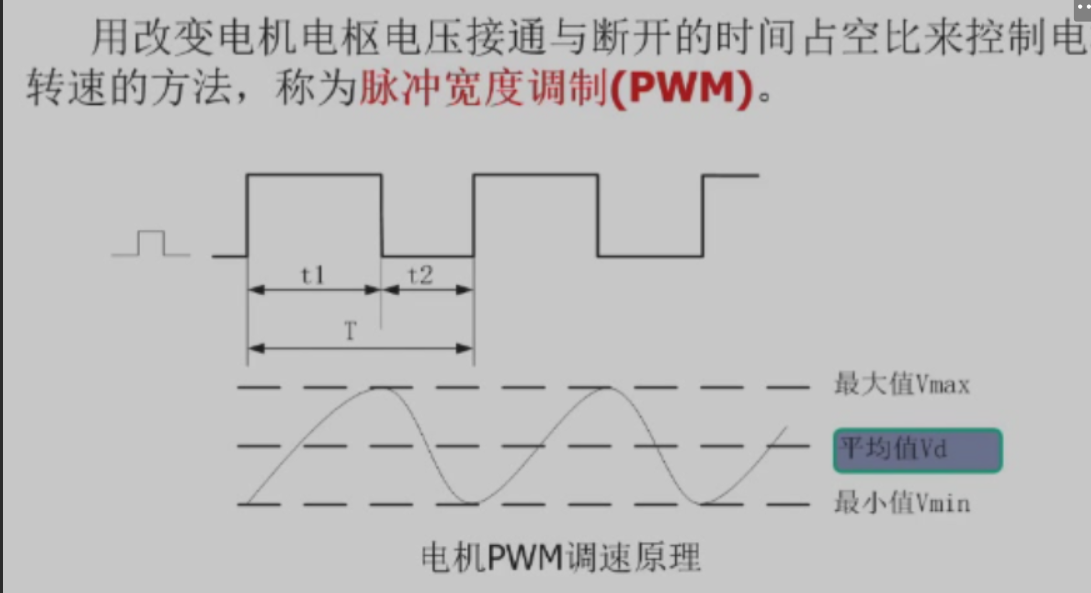
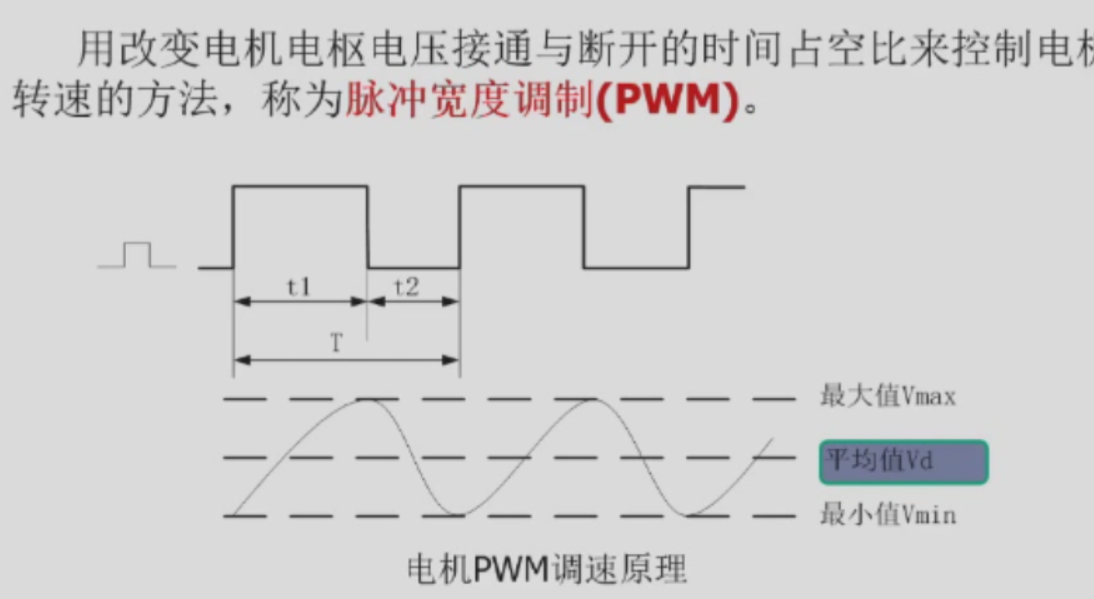
PWM 波
- 电流电机控制
- 信号传输(舵机控制)
相关知识 ¶
- delay()/delayMicroseconds():用于延时,第一个单位为毫秒,第二个为微秒。
-
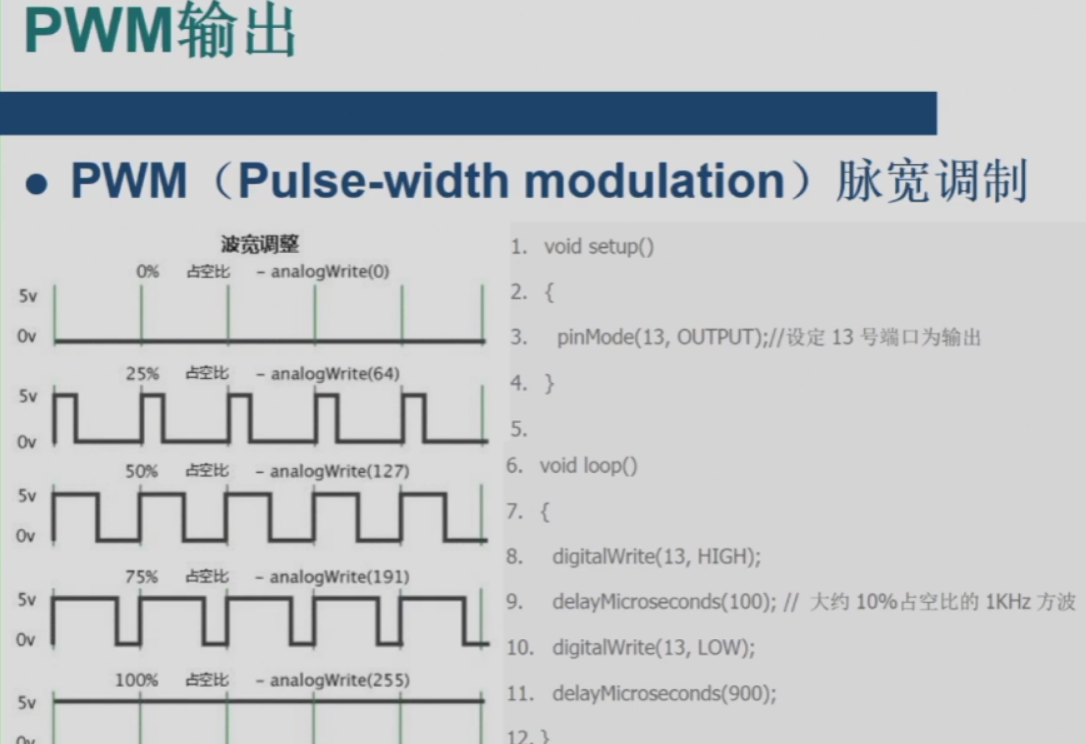
analogWrite(): 模拟 I/O 口输出,一般用于 PWM 输出,如:
analogWrite(13,127),为在 13 号引脚处输出一个占空比为 50% 的 PWM 方波,后一参数 0 表示关, 255 表示全开
void setup()
{
pinMode(13,OUTPUT);//设定13号端口为输出
}
void loop()
{
digitalWrite(13,HIGH);
delayMicroseconds(100);//大约10%占空比的1KHZ方波
digitalWrite(13,LOW);
delayMicroseconds(900);
}
三、传感器 ¶
定义 ¶
用于定量感知环境特定物质属性的电子、机械、化学设备,并能够把各种物理量和化学量等精确地变换为电信号,再经由电子电路或计算机进行分析与处理,从而对这些量进行检测
静态特性 ¶
指检测系统的输入为不随时间变化的恒定信号时,系统的输出与输入之间的关系
- 灵敏度(越高越好)
- 信噪比(S/N
) :传感器输出信号中信号分量与噪声分量的平方平均值之比 - 线性:输入输出为线性
精度
- 稳定性:输入量恒定,输出量向一个方向偏移(温漂、零漂)
- 精度
- 准确度:测量值对真值的偏移程度
- 精密度:测量相同对象,每次得到不同值
动态特性 ¶
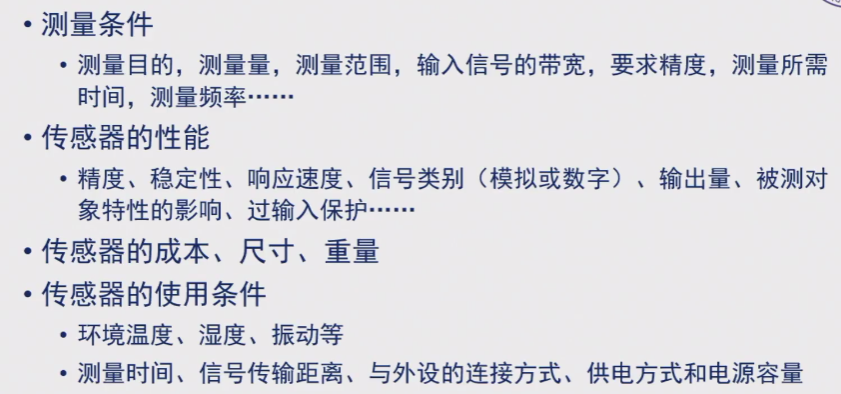
选择 ¶
尺寸、重量、价格、功耗敏感
常见传感器 ¶
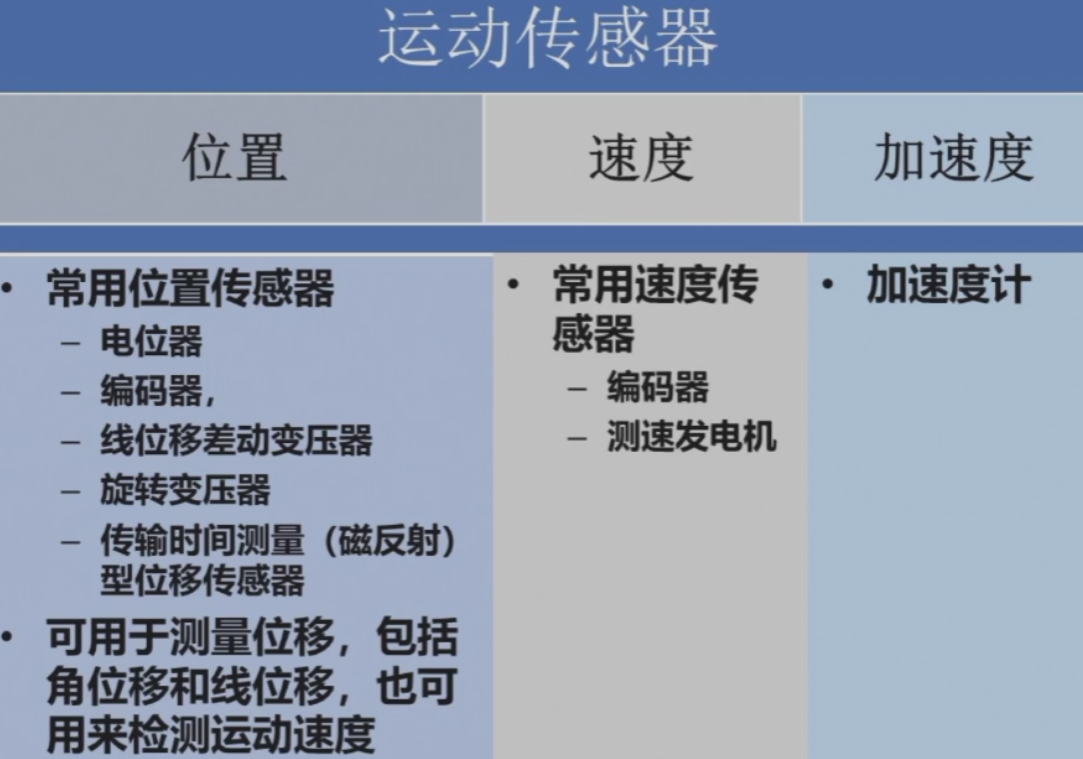
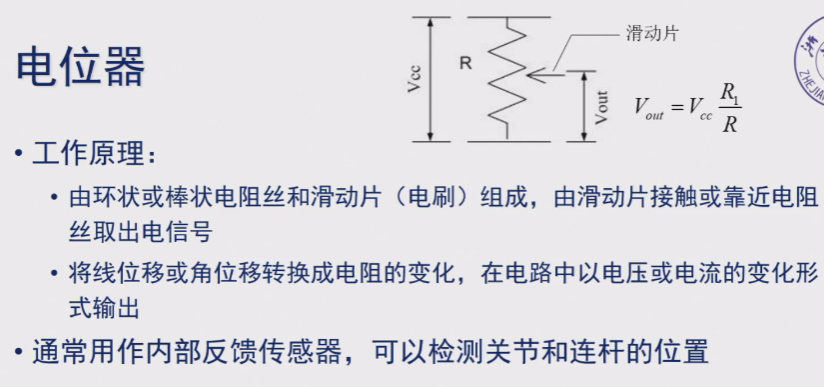
电位器 ¶
类别
旋转式 : 测量角位移
直线式 : 测量线位移
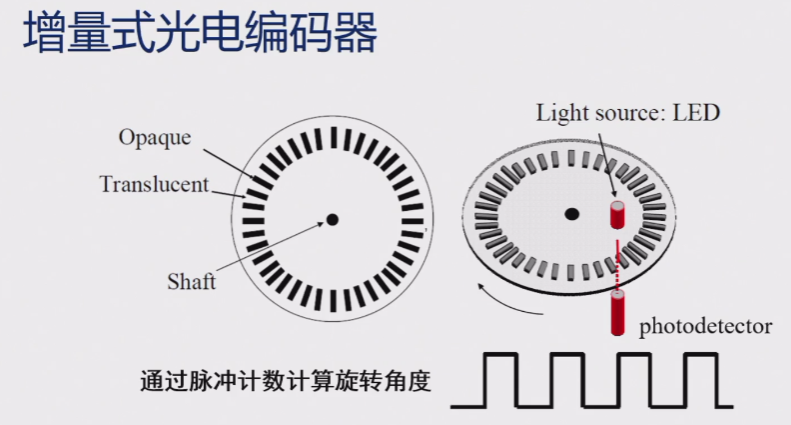
编码器 ¶
根据测量介质分:光电码盘、磁编码器
根据测量结果分
- 增量式
- 绝对式
绝对式光电码盘
上电时候可以检测到位置、
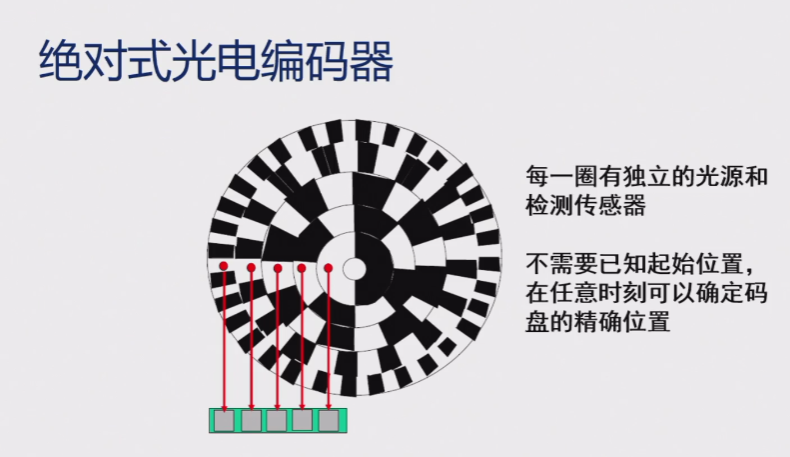
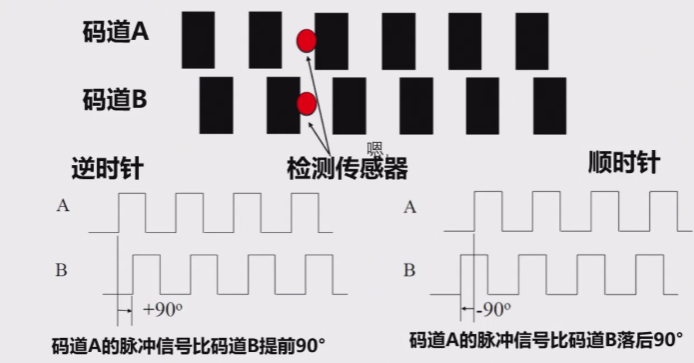
检测正反转 - 使用两个错位的码道
检测速度
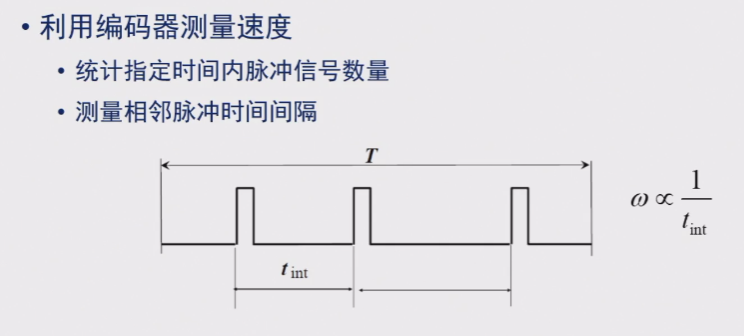
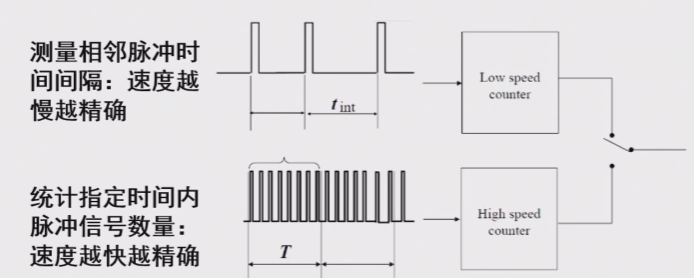
计量周期法和计量频率法
方向角传感器 ¶
指南针:霍尔效应
易受环境影响
陀螺仪:
机械(角动量大转轴不动)
光纤:光速不变、光干涉
MEMS(科里奥利力
距离传感器 ¶
- 红外光接近觉传感器
- 回波式接近觉传感器
题目
分析超声波 / 激光传感器的原理及其各自的优缺点
超声波
原理:
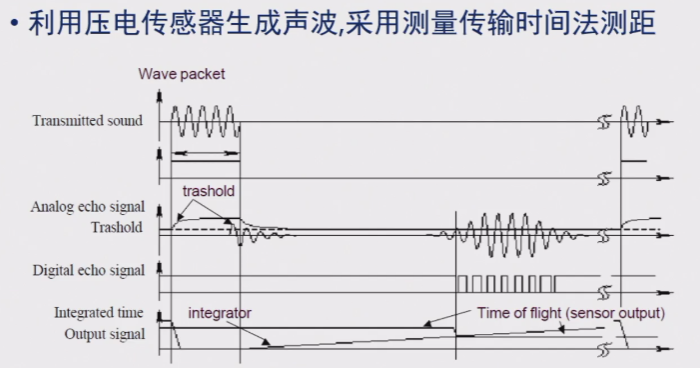
发出声波,检测发出与回波之间的时间差 $$ Length = frac{vtimes T_{total}}{2} $$
问题:
- 声波速度慢,时间比较好测量,但是降低了感知速率
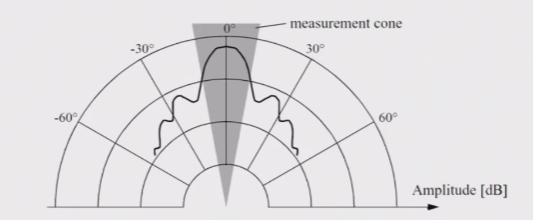
- 声波束按照锥形传播,分辨率较差,无法分辨尺寸偏大 or 偏小;无法分辨角度、方向
- 光滑反射、吸收
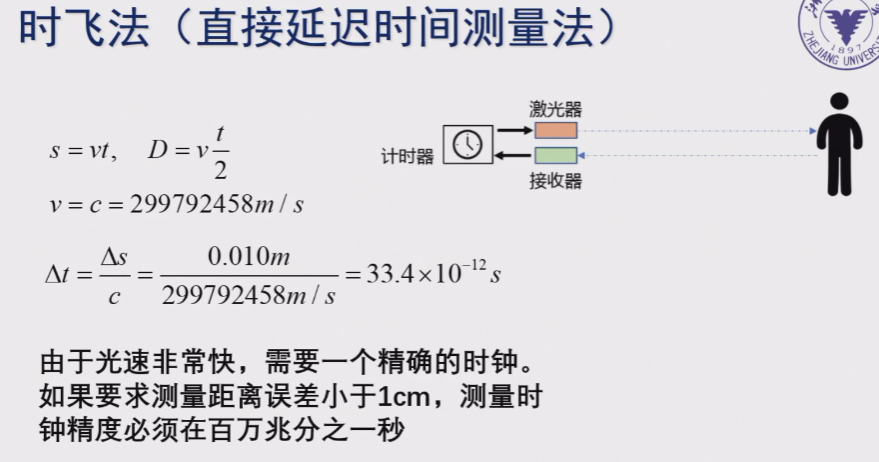
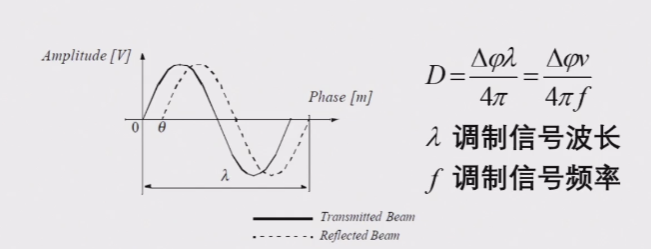
激光雷达
光是不会像声波发散
精确检测方位角,检测物体宽度
方法:三角法,时飞法,相位偏移测量法
力觉传感器 ¶
压阻式、压电式、电容式
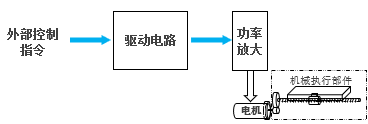
四、驱动 ¶
电机驱动:将电能转换为旋转或直线运动动能,最常见最普遍,控制简单稳定性好,输出精准,但是力矩小,需要配合减速器使用。
液压驱动:以液压油为传动介质,液压缸作为驱动器,单位重量传输功率大,可以产生很大输出力,响应迅速,但是系统复杂、成本高,体积重量大,输出精度较低。
气压驱动:以压缩空气作为动力源,动作迅速,反应快,结构简单,但是受负载影响大,不适宜精密位置和速度的控制,输出力小。 其他驱动:压电陶瓷驱动,形状记忆合金驱动(软体机器人)等
电机 motor ¶
输出力矩和速度,如小车的直线运动和转弯
需要驱动芯片以及控制方式
- 优点:控制调节简单、稳定性较好
- 缺点:力矩小、刚度低,常常需要配合减速器使用
\(P = \frac{v}{i} \times Ti\)
注意:力矩 X 转速 = 功率
有刷电机与无刷电机 ¶
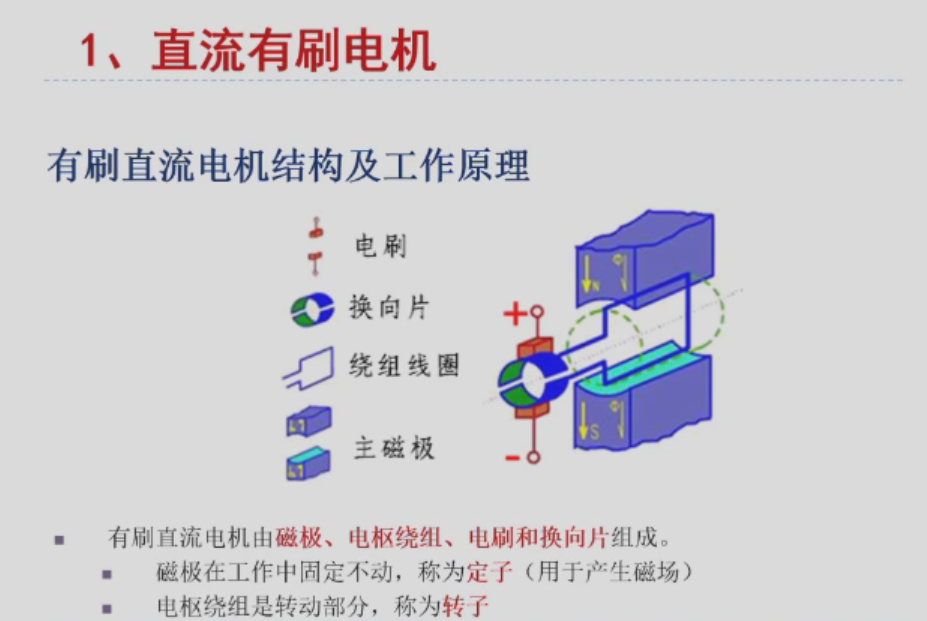
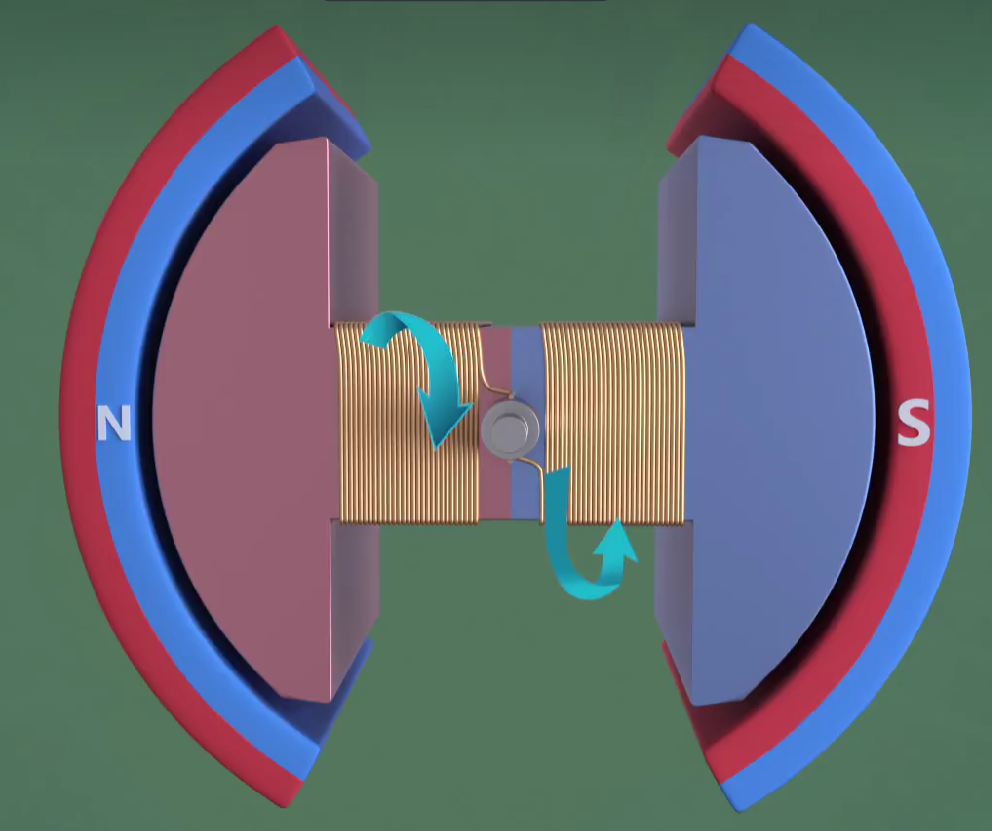
定子不动,改变转子的磁极,就可以完成换向。
中间部分由惯性。
使用三、五线圈的奇数线圈,就不存在“平衡位置”了。
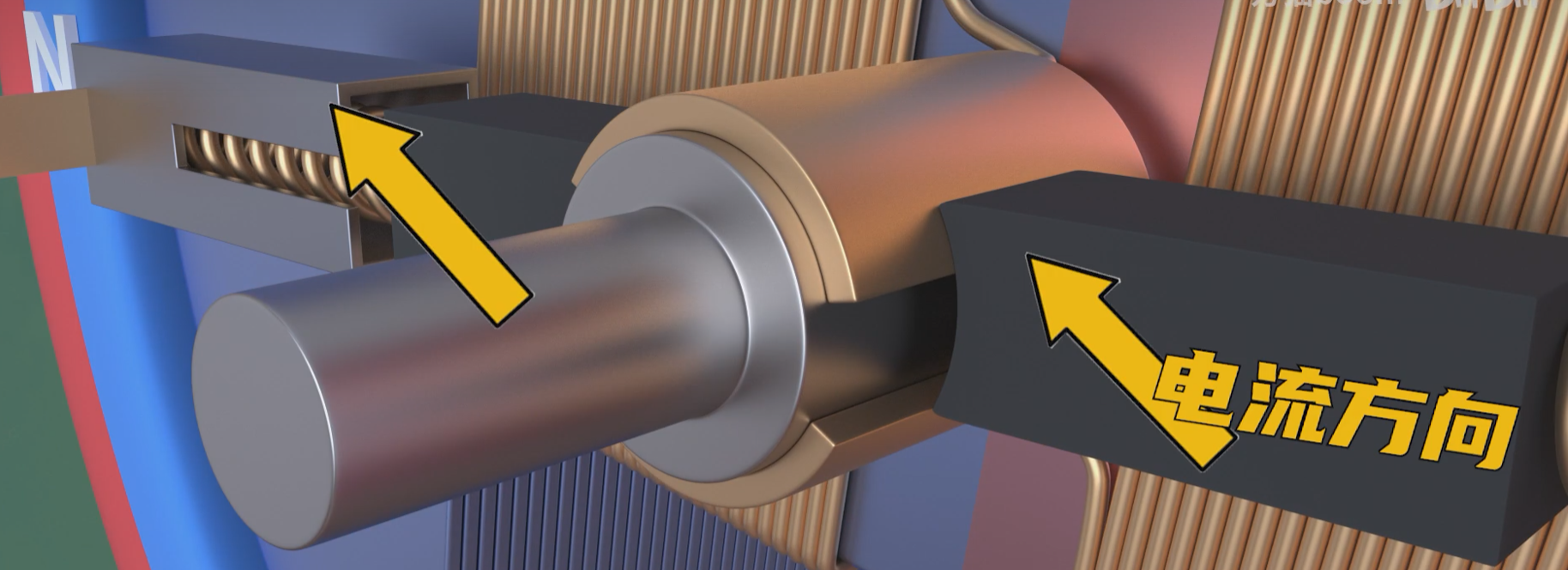
使用 2N1S 顺,2S1N 逆
限制:电刷;电刷与换向片接触产生动力损耗。
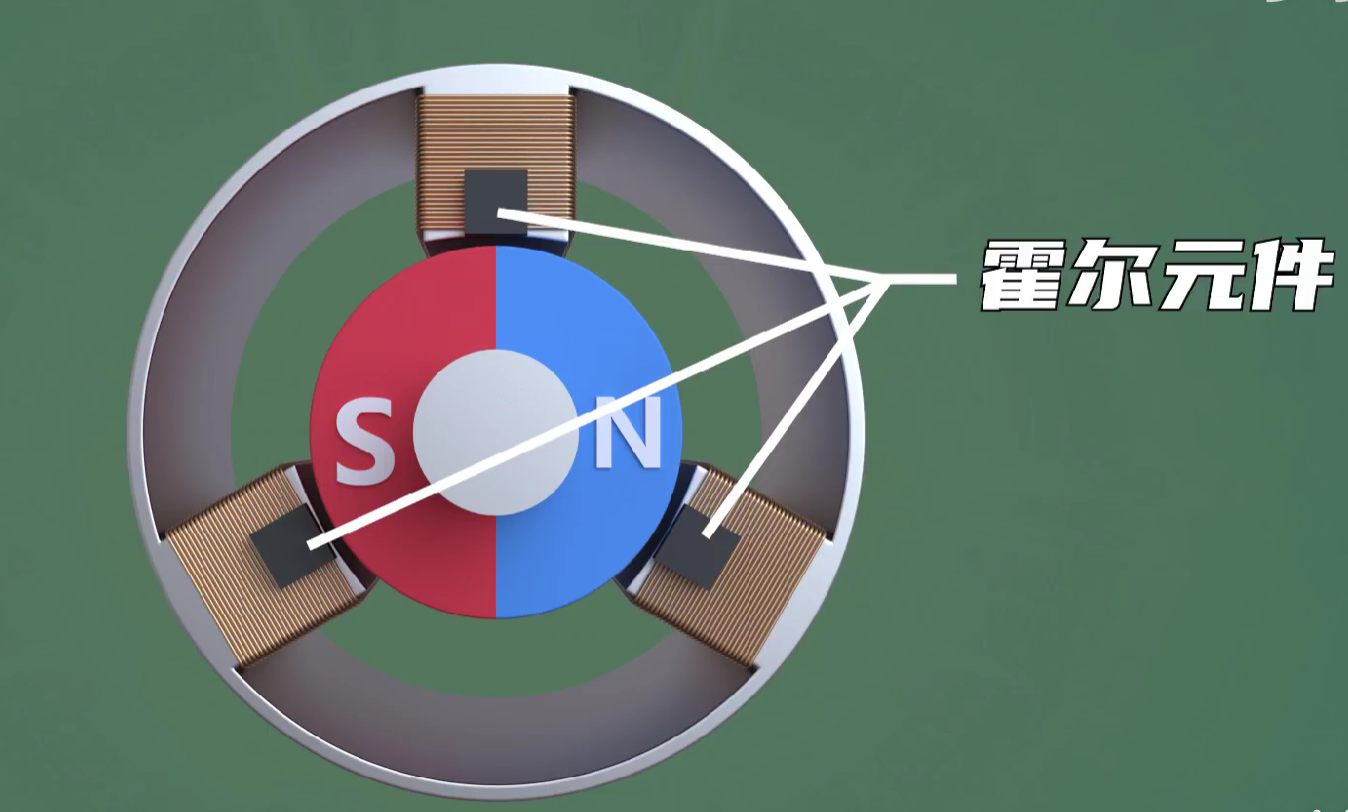
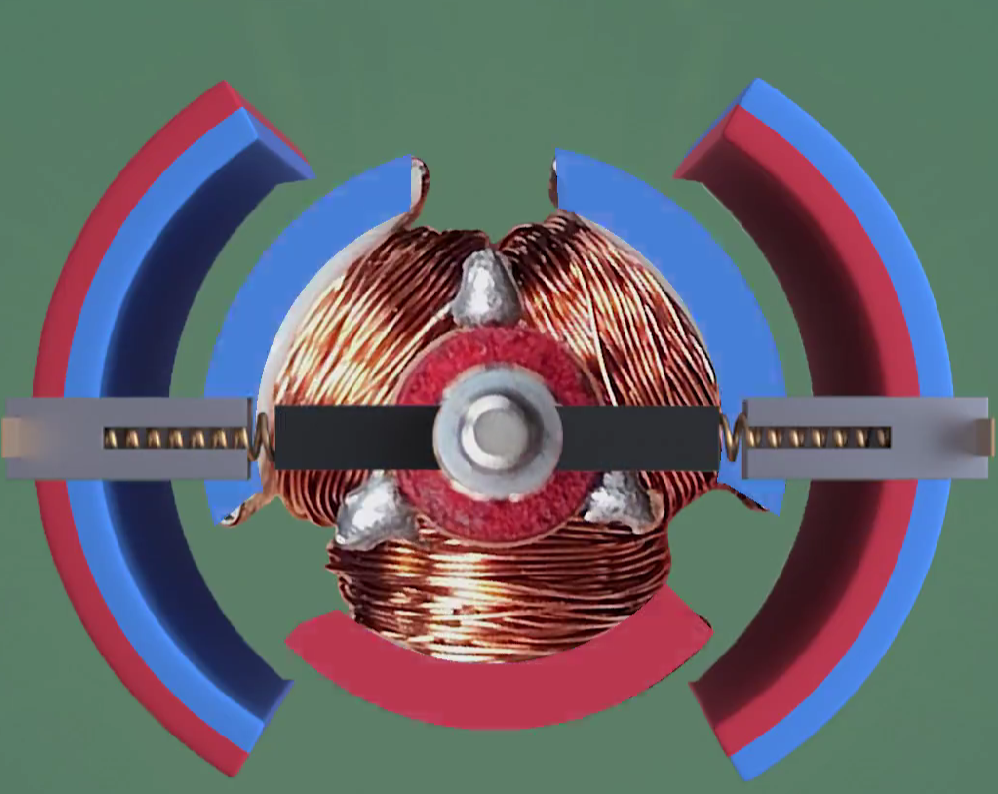
永磁铁作为转子,电磁铁作为定子。
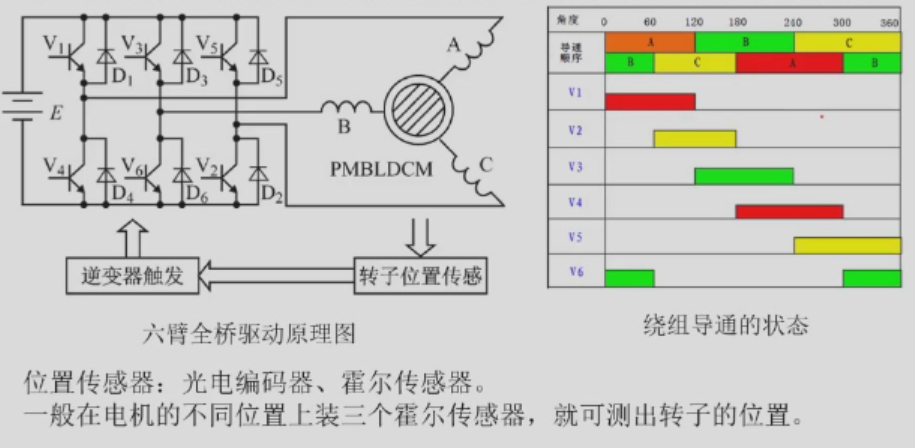
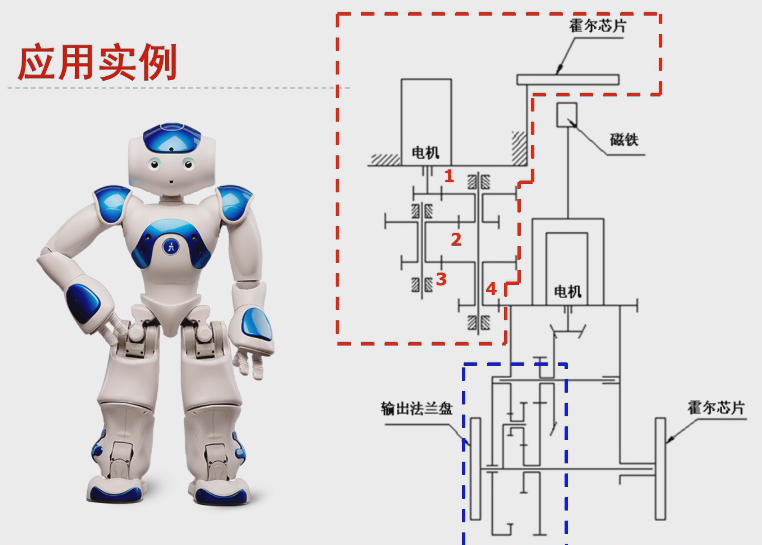
如何判断何时改变电流输入:一般在电机的不同位置上装三个霍尔传感器,就可测出转子的位置,使用霍尔原件感应转子的状态和位置。
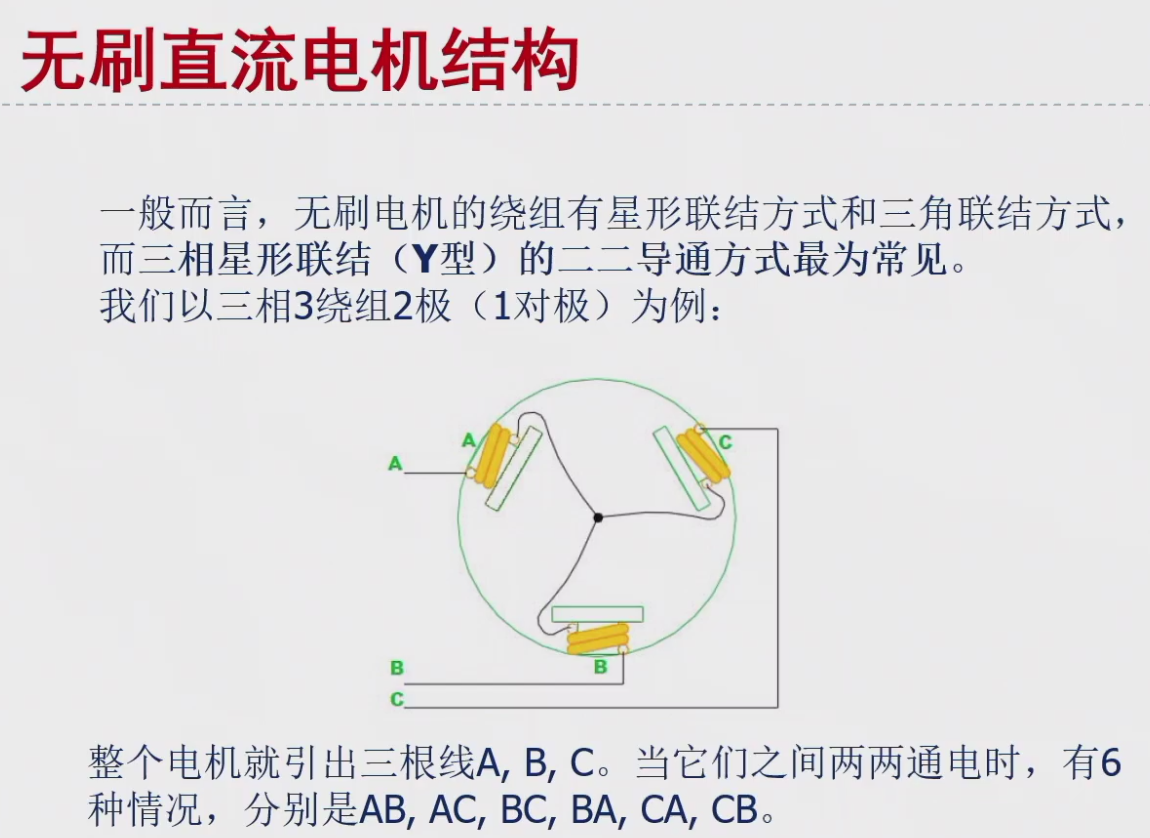
转动顺序、导通方式
AB,AC,BC,BA,CA,CB
后三个是前三个反序
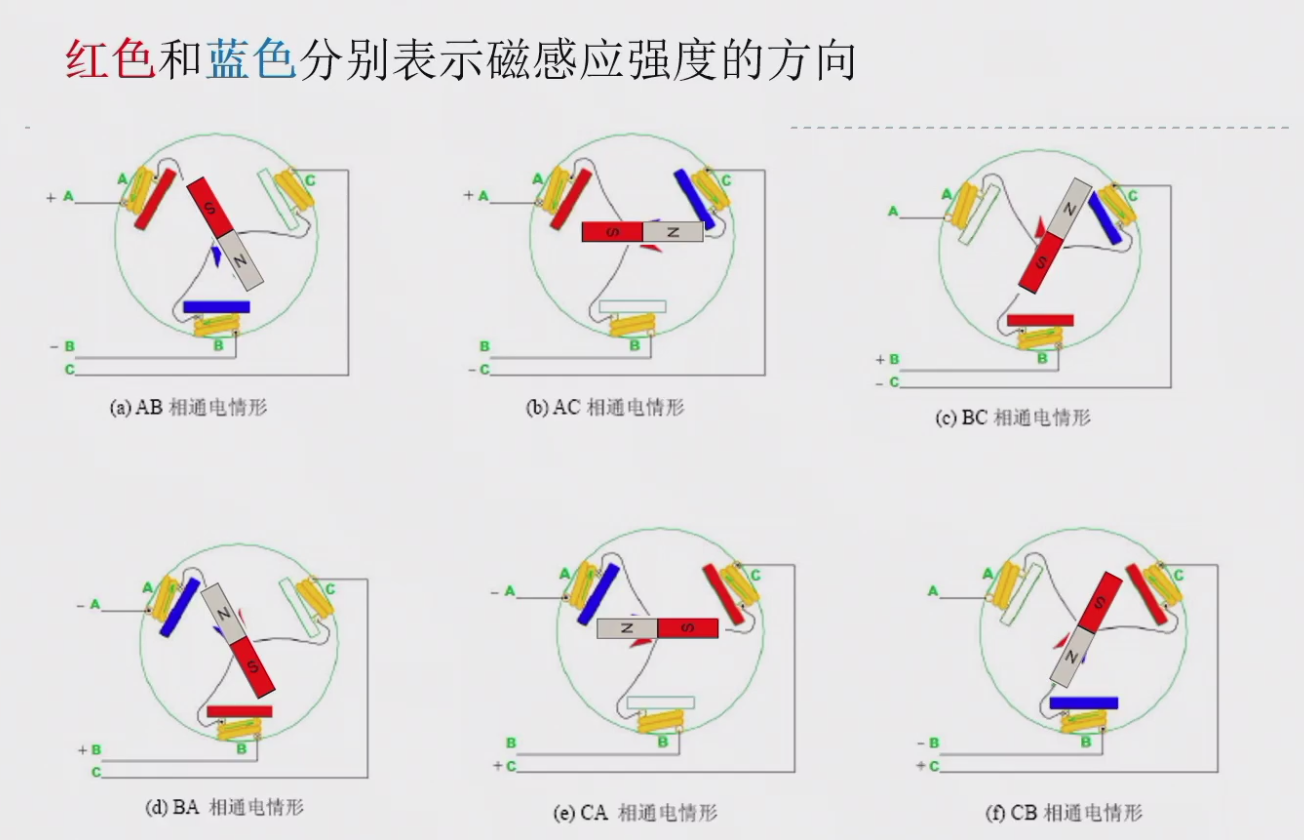
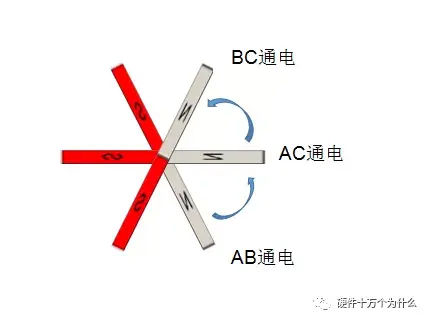
换向的过程
三相 9 绕组 6 极(3 对极)
转子的 NS 极与绕组电流产生的 NS 极有对其的运动趋势,这个惯性使得其能够旋转
注意:每一相是串联的
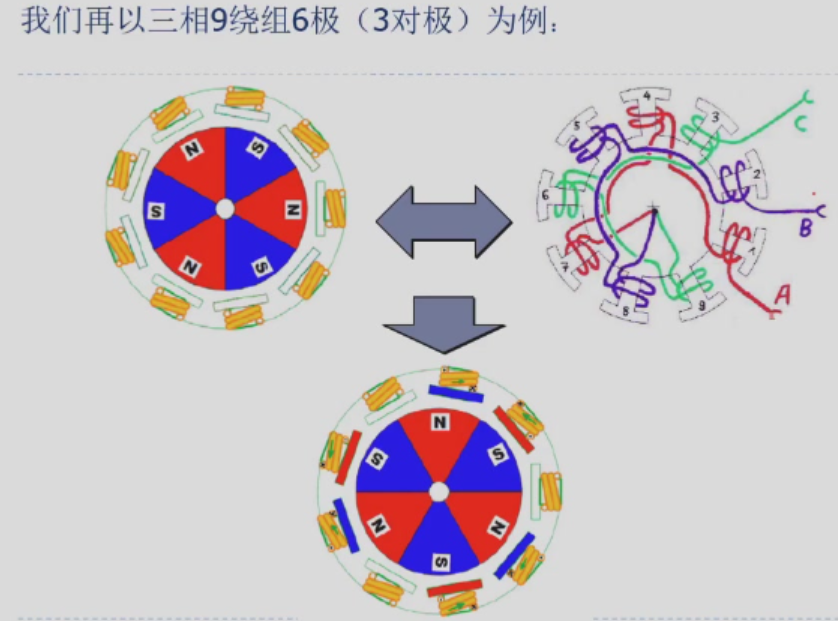
采用9 绕组 6 极,而不是6 绕组 6 极原因:为了防止定子的齿与转子的磁钢相吸而对齐,产生类似步进电机的效果,此情况下转矩会产生很大波动
总体来说且转数提升容易基本只受限于轴承。
缺点是启动功率输出和荷重输出(工作突然加重工作 / 爬坡能力)类比有刷电机少将近百分之 20,控制器贵稳定性成熟度(工业性价比)不如有刷
调速 ¶
滤波
电机控制 ¶
一个电机由静止到额定转速是怎么实现的
等效电路
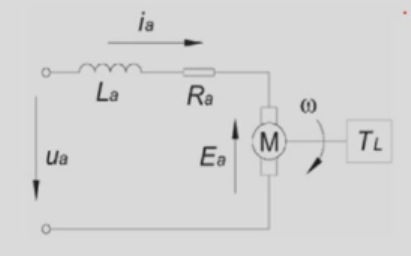
电枢电动势 Ea,电磁转矩 T,电磁功率 P
Ke 速度常数,Km 力矩常数
I 电枢电流,w 角速度 $$ begin{align} E_a &= K_e cdot n\ T &= K_m cdot I\ P &= E_a cdot I = T cdot bar{omega}\\
U &= E_a + I cdot R_a = K_e cdot n + I cdot R_a\ n &= frac{U-Icdot R_a}{K_e} end{align} $$
力矩与电流大小成正比
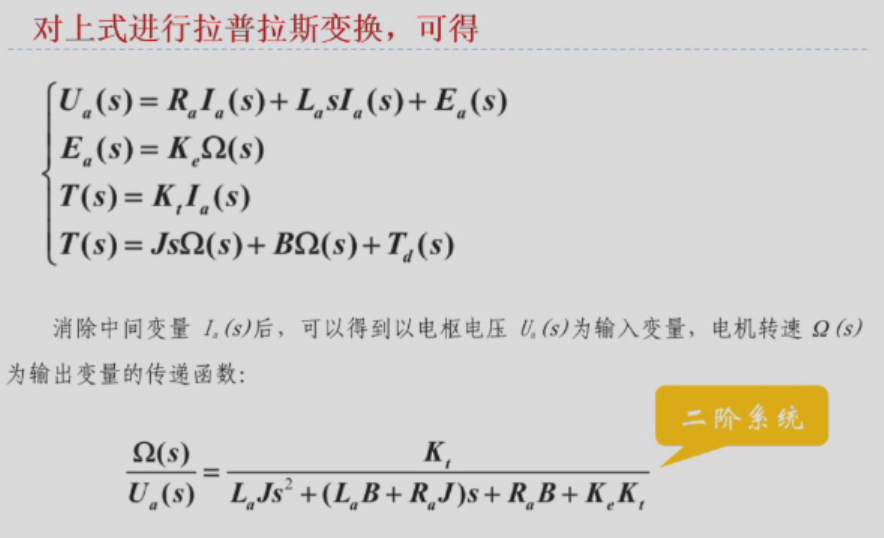
转速与感应电动势大小成正比 $$ begin{align} 电压平衡方程:& u_a(t) = R_ai_a(t) + L_afrac{di_a(t)}{dt} + E_a(t)\ 感应电动势方程:&E_a(t) = K_e omega\ 电磁转矩方程:&T(t) = K_t i_a(t)\ 转矩平衡方程:&T(t) = Jfrac{domega(t)}{dt}+ Bomega(t) + T_d(t) end{align} $$ \(J\)表示电机的转动惯量,\(\omega(t)\)表示电机的角速度,\(B\)表示电机的阻尼系数,\(T_d(t)\)表示电机所受的负载转矩。
电机烧掉:电机铜线外绝缘体破坏,电线与电线之间短路
检查方法:测量电机绕组的电阻值是否正常进行判断
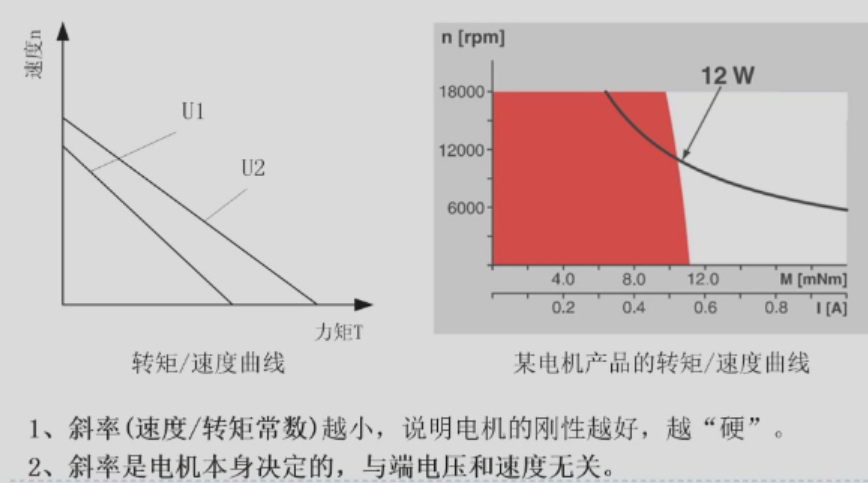
白色区域需要注意
如何控制小车右转
如何控制小车原地右转
如何控制小车以半径 1m 右转
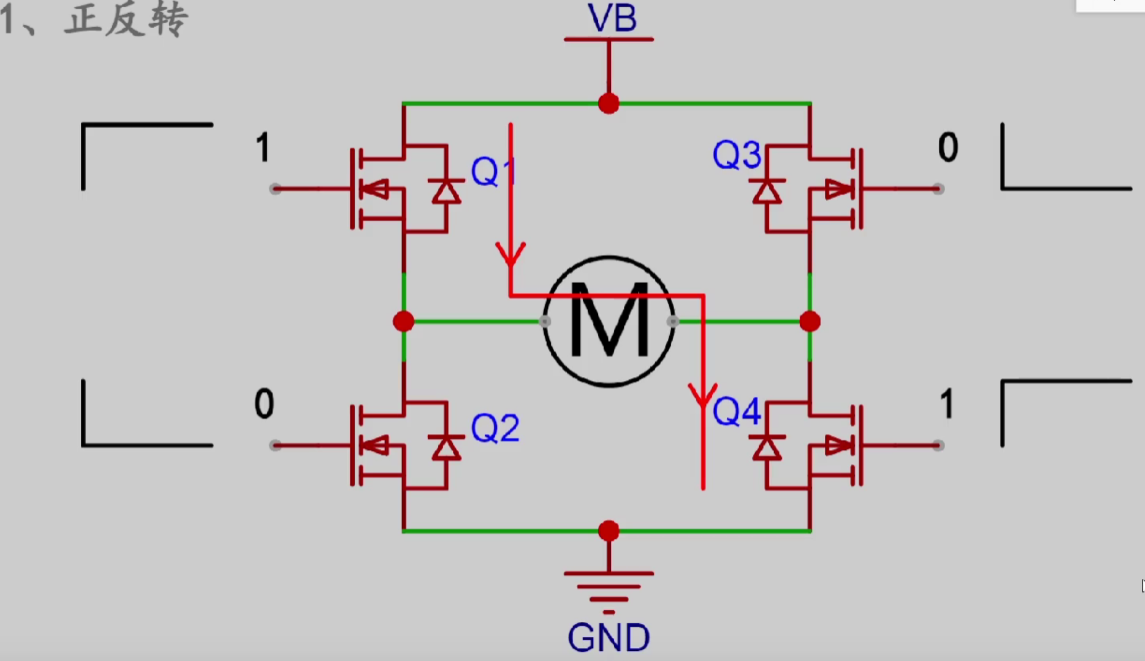
有刷电机(H 桥驱动)¶
最常用的驱动方式
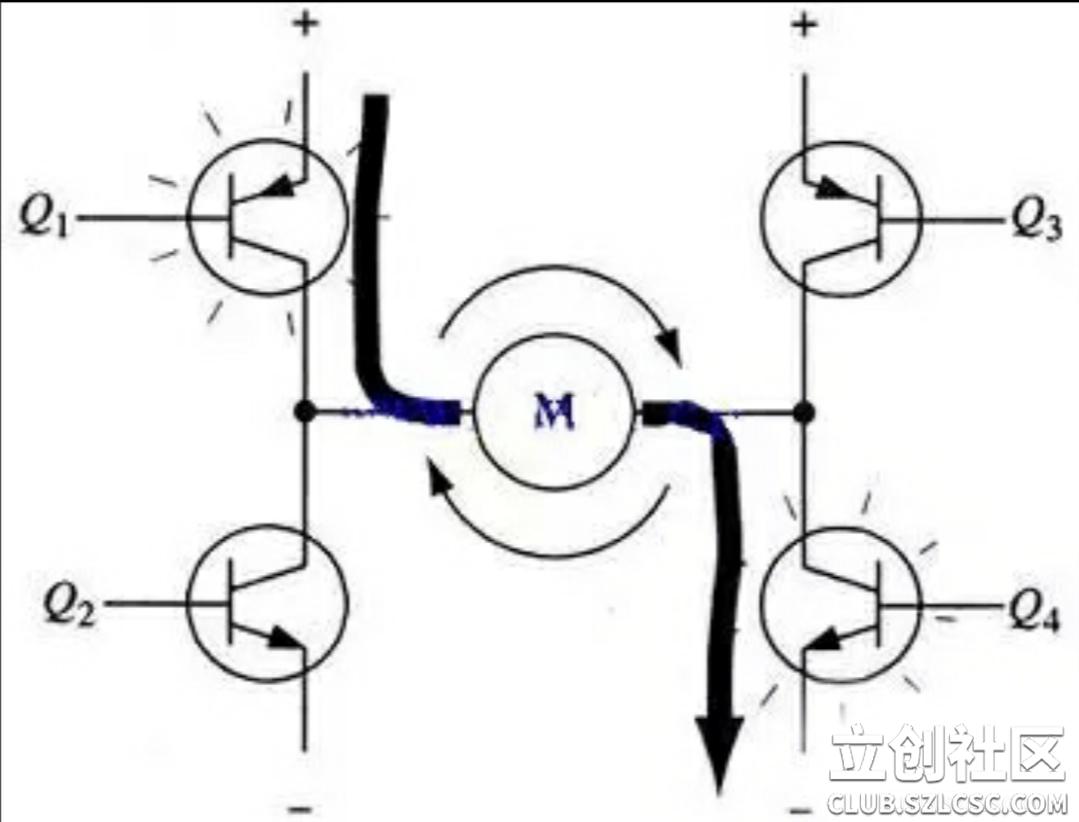
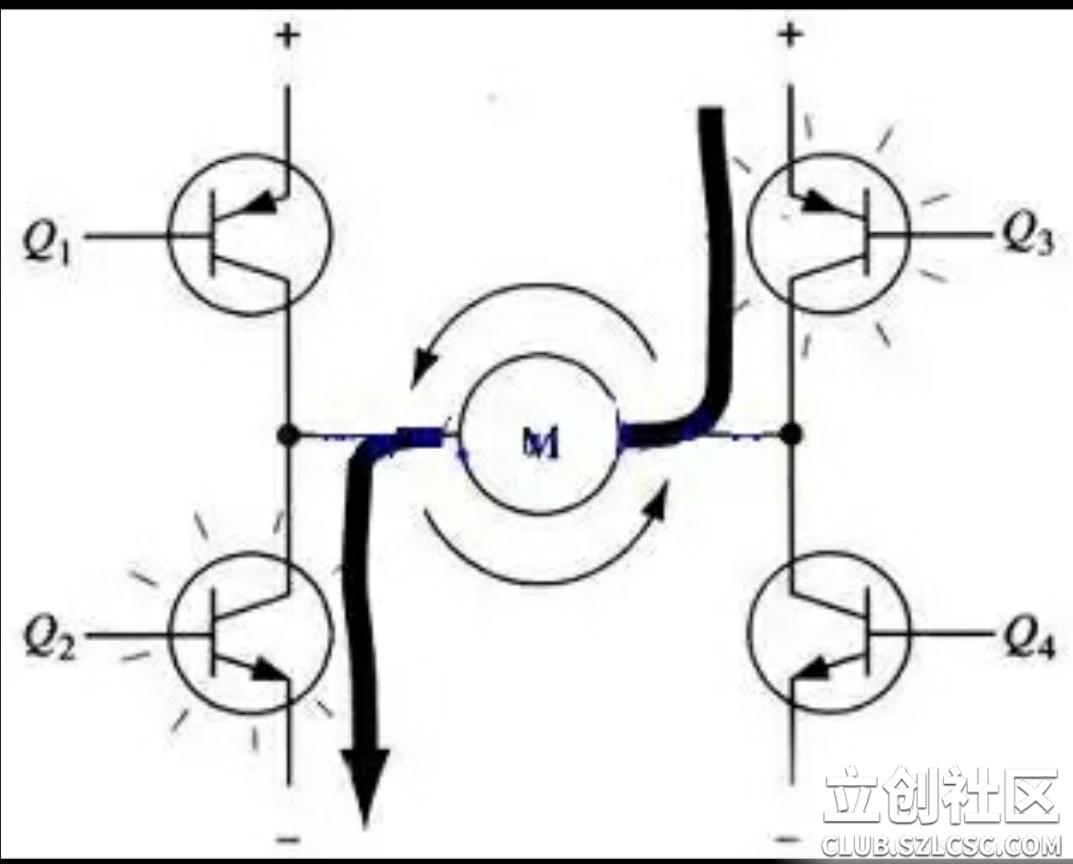
上图为电机的正反转
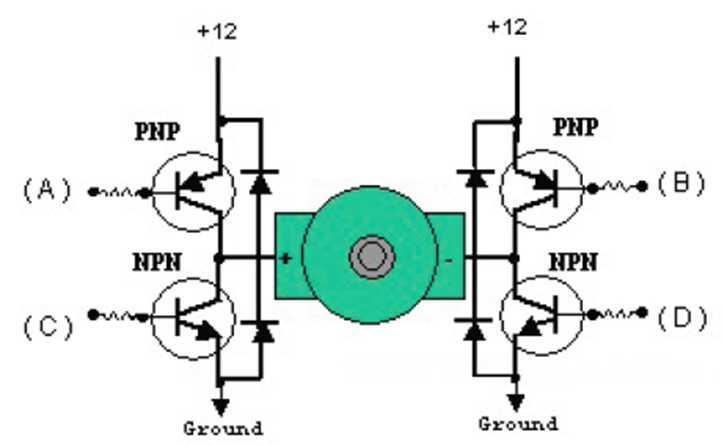
为了避免电机的反电动势的危害,仍然需要在三极管两端接二极管,因为电机线圈在电路开闭瞬间产生的反向电动势会高过电源,对晶体管和电路会造成影响,甚至是烧毁元件。
一般用L298 芯片来控制电机转动,可以驱动两个直流电机
光电隔离电路 ¶
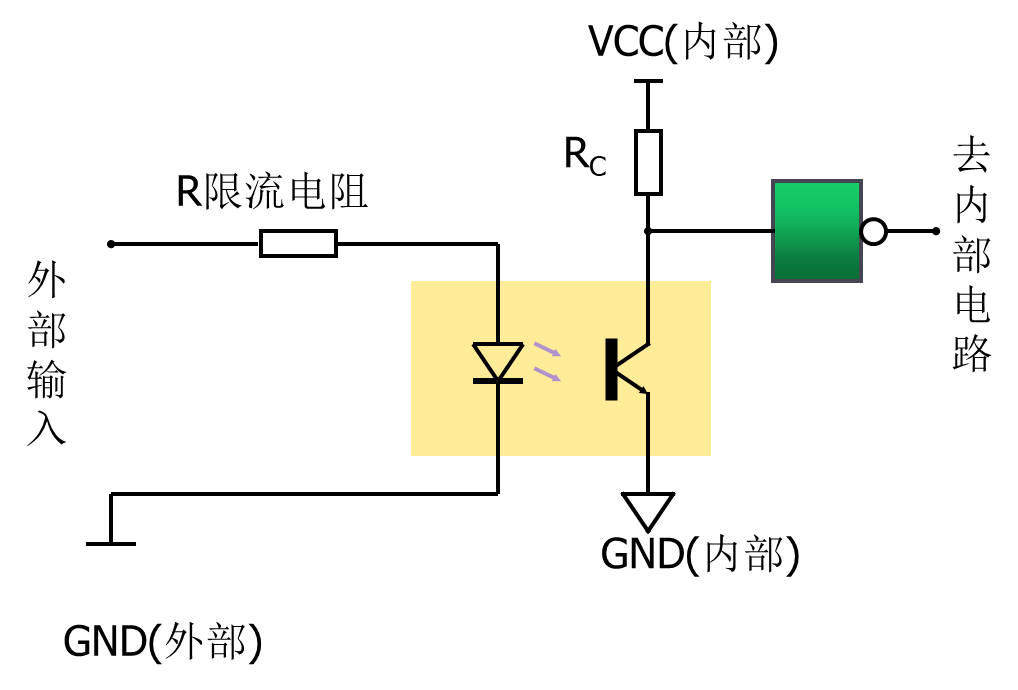
可以实现抗干扰
基本控制方式 ¶
开环伺服系统 ¶
精度较低, 但稳定性最好。
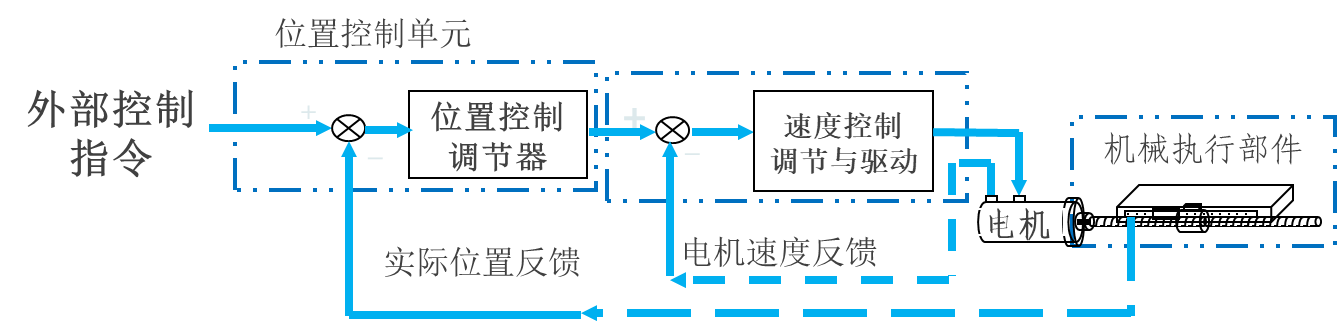
闭环伺服系统 ¶
精度较高,但系统的结构较复杂、成本高,还有系统稳定性的问题
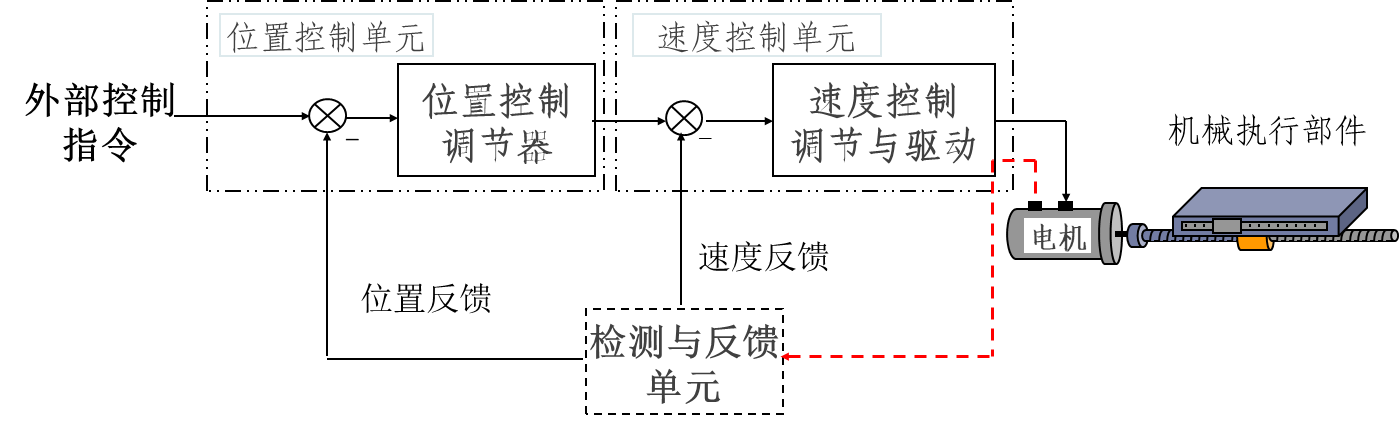
半闭环伺服系统 ¶
反馈电机信息,控制电机
精度比闭环要差一些,稳定性比闭环好,但比开环要差一些
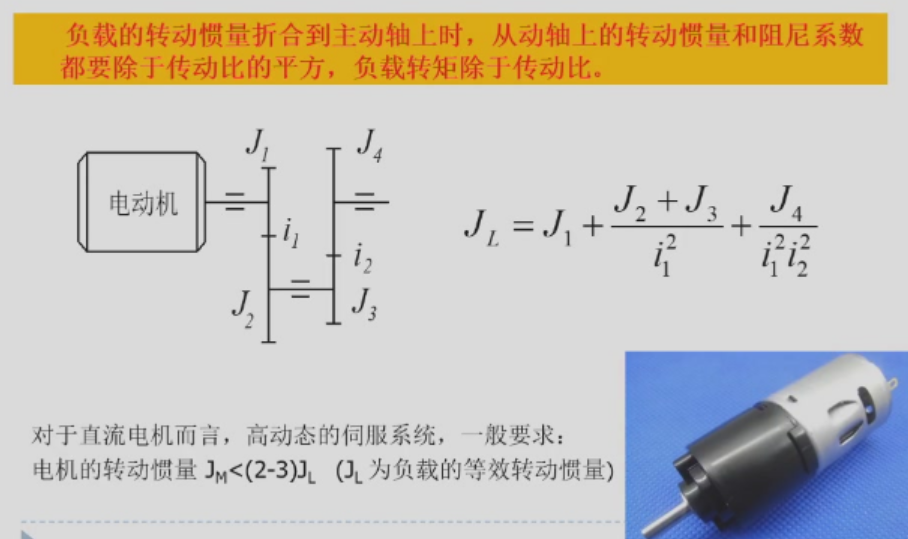
转动惯量匹配 ¶
负载的转动惯量折合到主动轴上时候,从动轴上的转动惯量和阻尼系数都要除以传动比的平方,负载转矩处于传动比
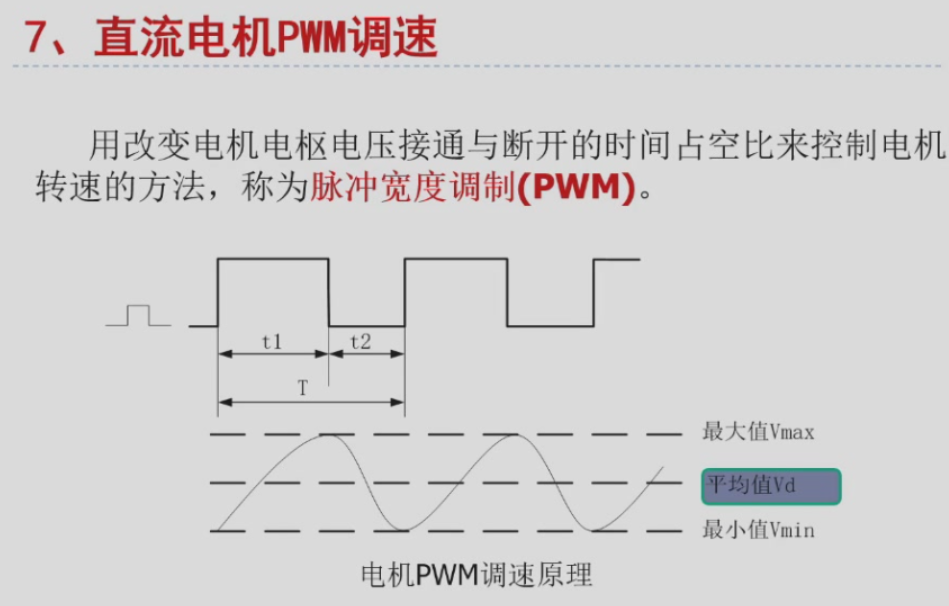
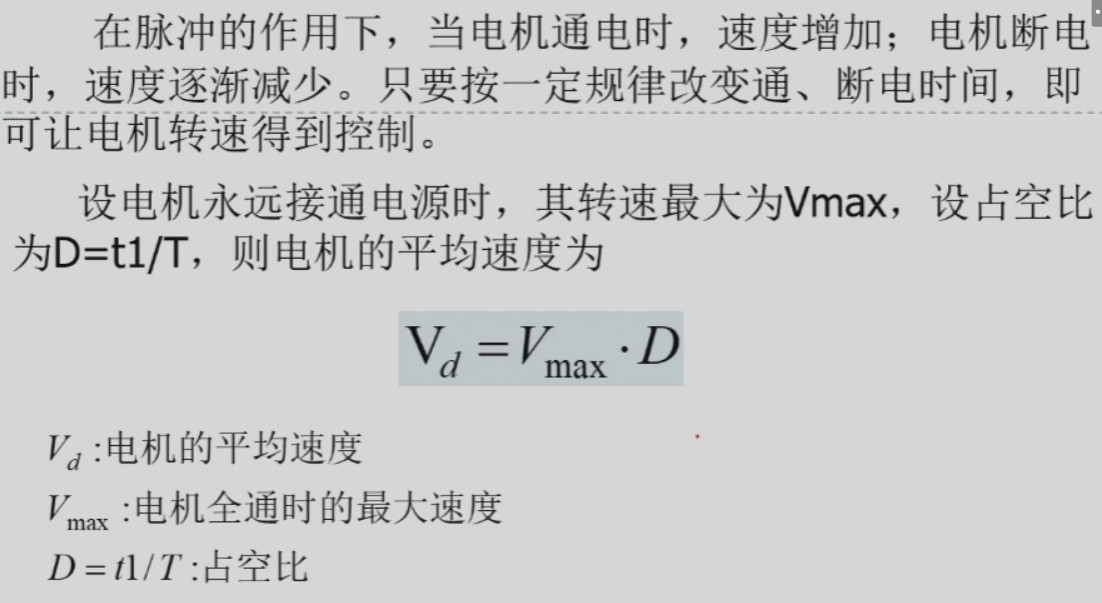
设一直接高电平时,转速最大是 \(V_{max}\),占空比为 \(D= \frac{t_1}{T}\)
电机平均速度为 $$ V_d = V_{max}cdot D $$
\(V_d\): 电机的平均速度
\(V_{max}\)
\(D=\frac{t_1}{T}\): 占空比
舵机 ¶
控制角度,位置伺服,如机械手;
用 PWM 波控制
控制线:电源线、地线、控制线
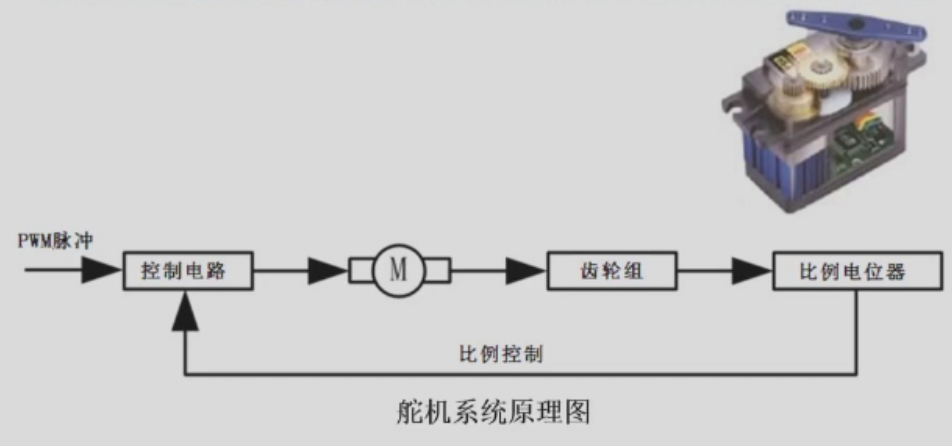
电机 + 减速器
标准舵机有三条控制线,分别为电源线、地线和控制线。控制线连接到控制芯片上
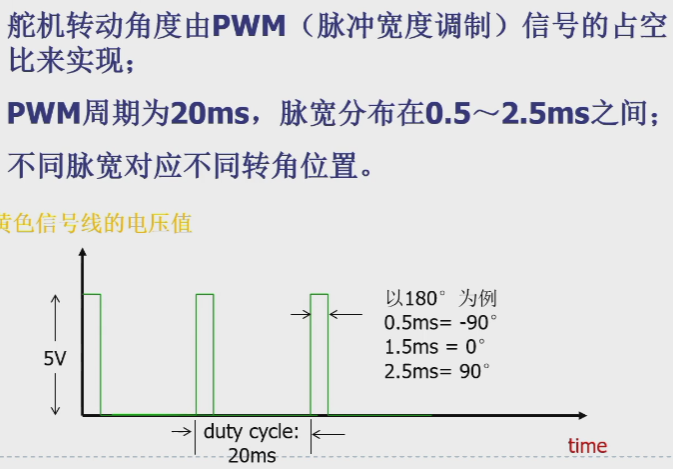
直流电机 PWM 匹配
占空比
气动 ¶
- 气压驱动以空气压缩为动力源,也是机器人驱动的一种重要形式。
- 气动式主要有气缸、气阀、管路等元件组成。
- 优点:气源获得方便、成本低、动作快。
- 缺点:输出功率小,体积大。一般而言,其工作噪声较大、控制精度较差。
分类 ¶
包括气压发生装置、辅助元件、控制元件和执行元件
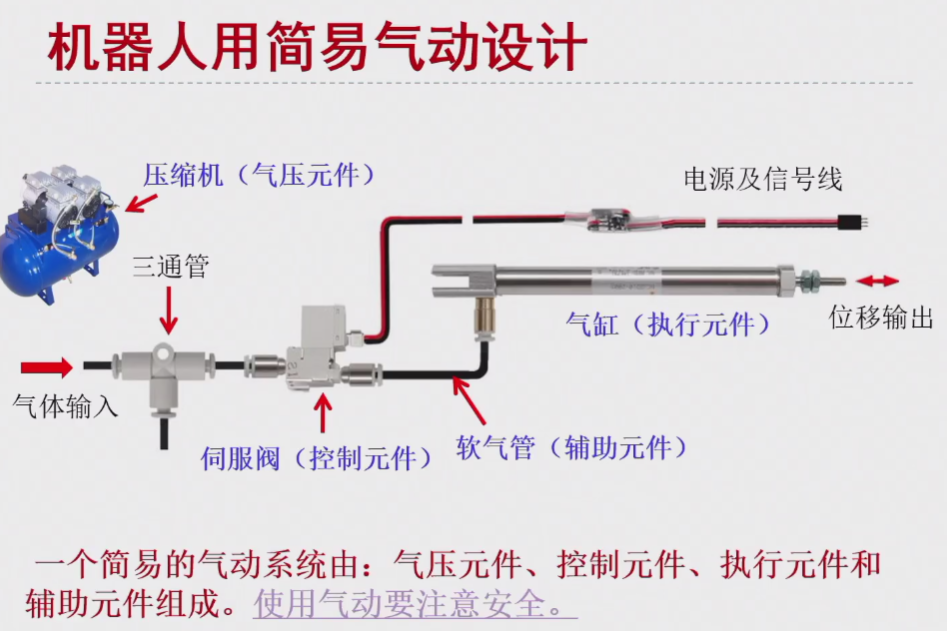
- 气压元件:气源装置,其功能是将原动机输入的机械能转换成流体的压力能,为系统提供动力
- 执行元件:气缸、气马达,功能是将流体的压力能转换成机械能,输出力和速度或转矩和转速
) ,以带动负载进行直线运动或旋转运动 - 控制元件:压力、流量和方向控制阀,作用是控制和调节系统中流体的压力、流量和流动方向,以保证执行元件达到所要求的输出力(或力矩
) 、运动速度和运动方向 - 辅助元件:保证系统正常工作所需要的辅助装置, 包括管道、管接头、储气罐、过滤器和压力计
气体的特性 ¶
- 系统的压力应小于8个大气压(即 0.8MPa)
- 不可压缩流体
- 1大气压 =0.1013MPa=15psi( 磅 / 平方英寸 )
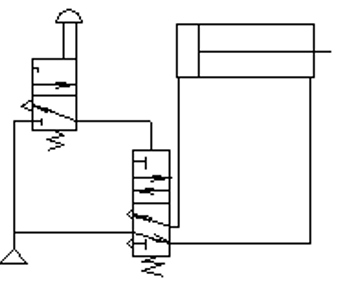
方向控制回路¶
单作用气缸换向回路 ¶
几位几通(考
几位:看有几种回路可以切换(有几个小格子)
几通:看每一个回路(小格子)里面有几个连接处
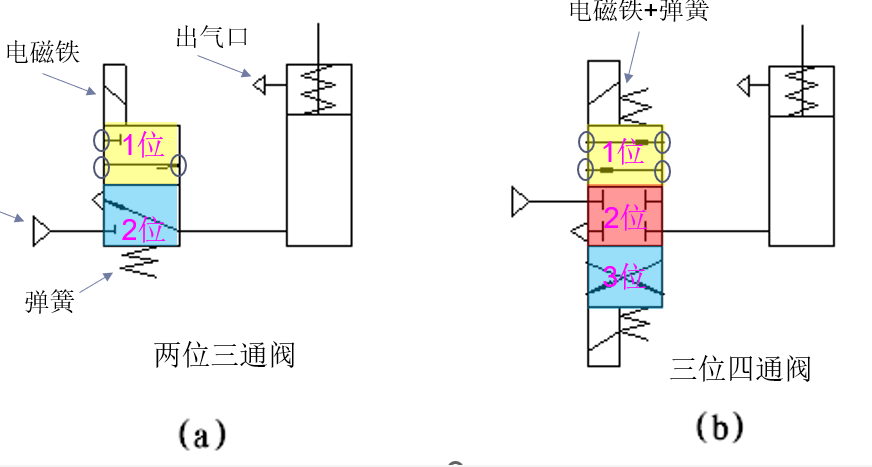
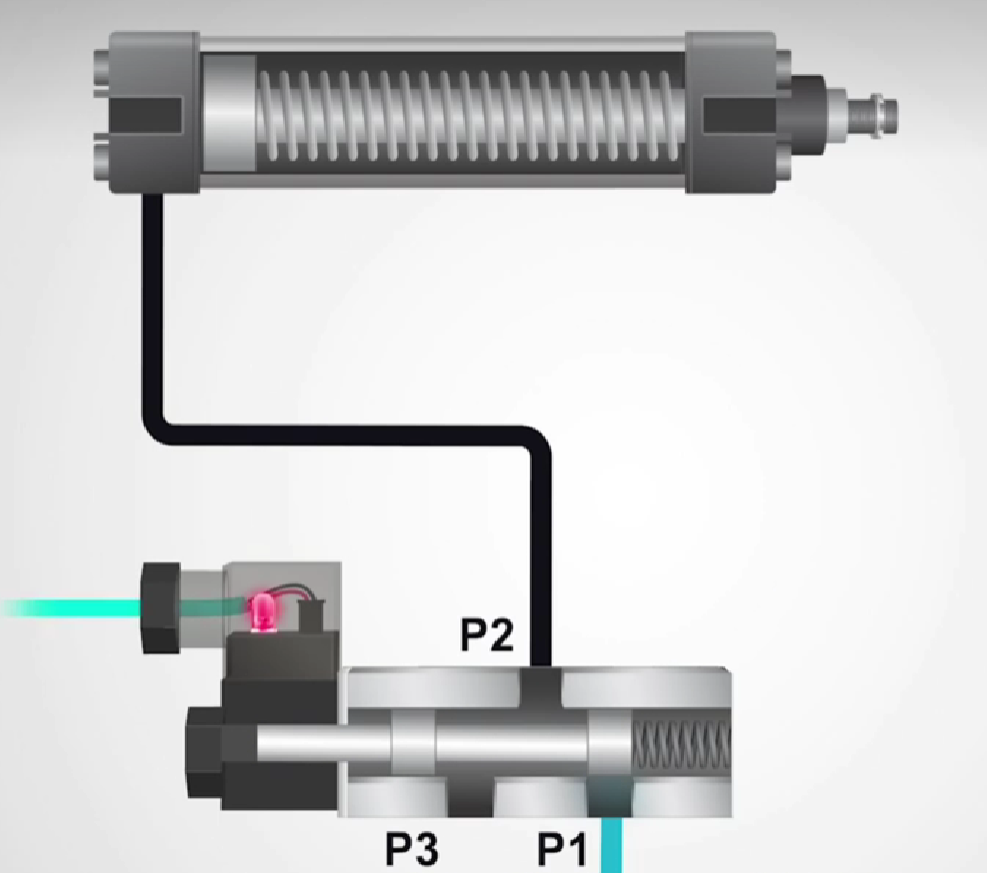
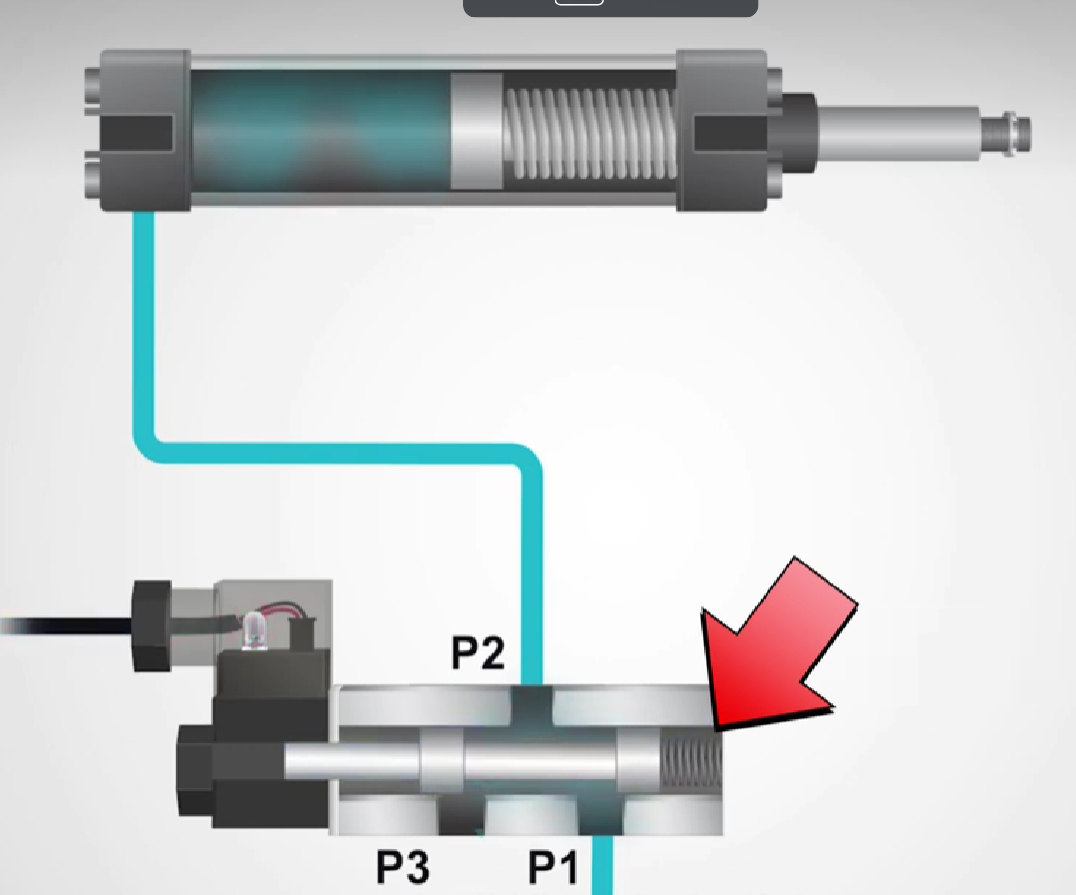
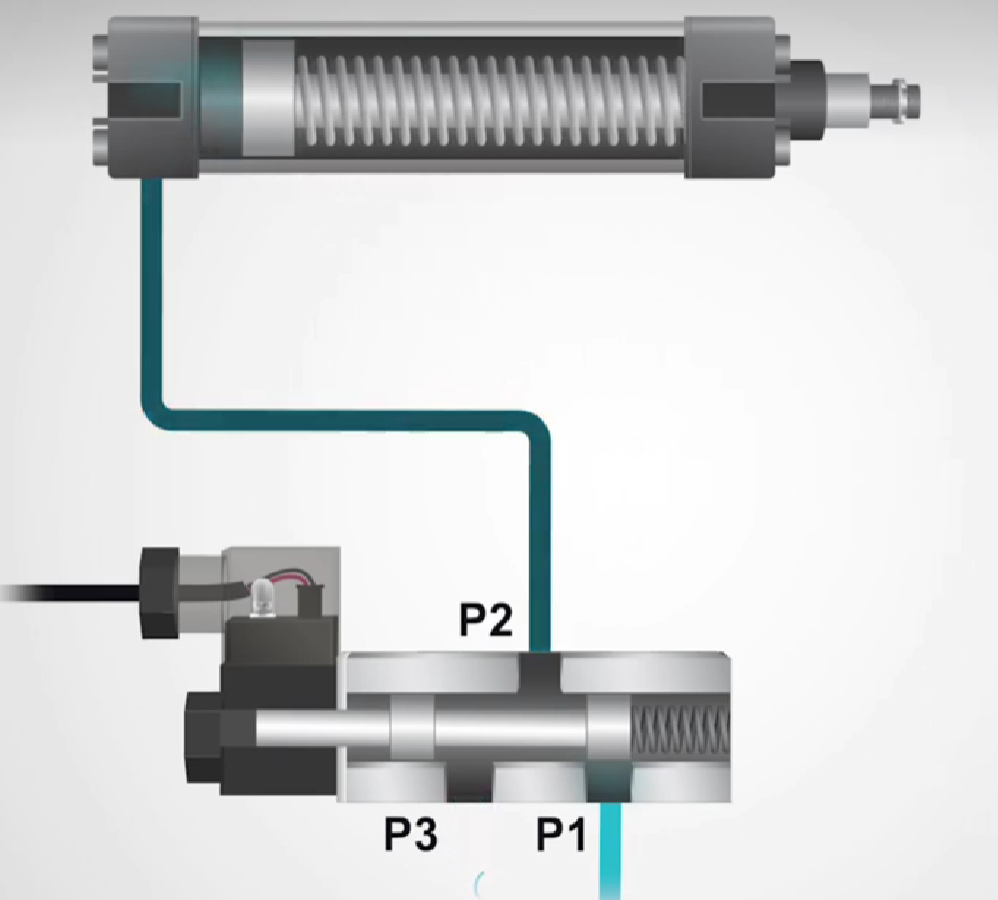
对于 a 图
在第二位时,P2P3 相通,P3 出气,右边气缸由于弹簧被压缩,向下运动
在第一位时,P3 堵住,P2P1 相通,进气导致向上运动
对于 b 图
在第三位时(蓝色
在第二位时(粉色
在第一位时(黄色
注:有几位就有几种状态 !
对于每一种状态,将接线平移到对应的格子上,观察进气口气体的流向,从而判断如何进行换向
双作用气缸换向回路 ¶
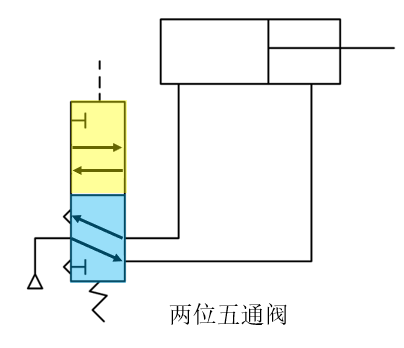
例:
不拍按钮时:左移
拍按钮时:右下角的被改变,因此右移
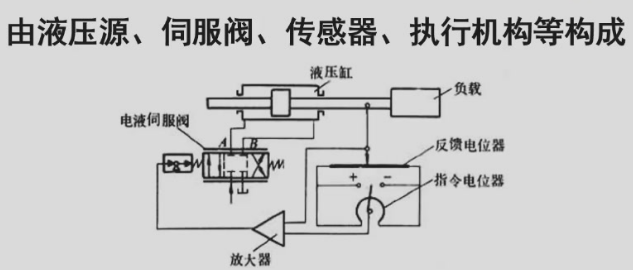
液压 ¶
- 将液体压力转化为机械能
- 利用不可压缩的流体,将作用于某一点的力传递到另一点,这种流体通常是工业液压油
- 由液压源、伺服阀、传感器、执行机构等构成
- 优点: 重量轻、尺寸小、动作平稳、快速性好、产生的力 力矩非常大 。
- 缺点: 易漏油、维护困难;不确定性和非线性因素多,控制和校正不如电气式方便
五、传动 ¶
参数 ¶
传动机构的性能要求 ¶
- 质量和转动惯量应尽量小。
- 刚度尽量大:伺服系统动力损失小(变形损失能量小
) ; - 频率要高,超出机构的频带宽度,使之不易产生共振;
- 闭环系统更加稳定。
- 阻尼越大,振动的振幅就越小,衰减也越快。但大阻尼会使系统稳态误差增大、精度降低。
强度与刚度 ¶
- 强度:零件在工作中发生断裂或残余变形均属于强度不足。
- 刚度:零件在工作中所产生的弹性变形不超过允许的限度。包括整体刚度和表面刚度两种。
- 相同的强度,结构不同,刚度不同
减速比 ¶
(传动比:输入速度与输出速度之比
减速比,也即传动比。指减速机构输入速度与输出速度之比,用“i”表示。即,i = 输入速度 / 输出速度,并使输出力 / 力矩变为原来的 i 倍。
例:电机输入减速箱的速度 1000n/min,输出速度 10n/min,则减速比 i =1000/10=100
如电机输出力矩为 Tin=0.1Nm,则输出力矩为 Tout=Tini=0.1Nm100=10Nm
传动比是指机械传动系统中,始端主动轮与末端从动轮的角速度或转速的比值。传动比可以描述输入轴和输出轴之间的速度关系,包括齿轮传动、链条传动等多种传动方式。传动比的计算公式为:传动比 = 主动轮转速 / 从动轮转速。
减速比则是传动比的一种特殊形式,专指减速装置的传动比。减速比是指减速机构中瞬时输入速度与输出速度的比值。减速比的目的是降低转速并增加扭矩,通常用于将高速低扭矩的驱动装置(如电动机)的速度降低,并提供高扭矩输出。减速比的计算公式为:减速比 = 输入转速 / 输出转速。
转动惯量 ¶
尽可能小,防止谐振
阻尼 ¶
支撑、导向系统:轴承和导轨
齿轮传动 ¶
齿轮传动是指由齿轮副传递运动和动力的装置,它是现代各种设备中应用最广泛的一种机械传动方式。
优点:传动比较准确,效率高,结构紧凑,工作可靠,寿命长。
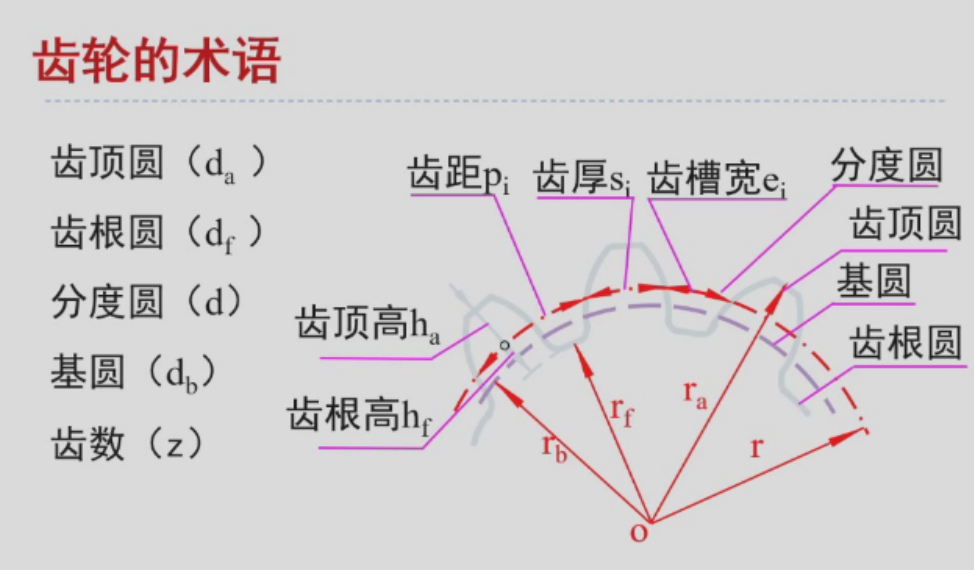
基本参数的计算公式 ¶
齿数要尽量大于 17
https://max.book118.com/html/2020/0123/8140121006002074.shtm
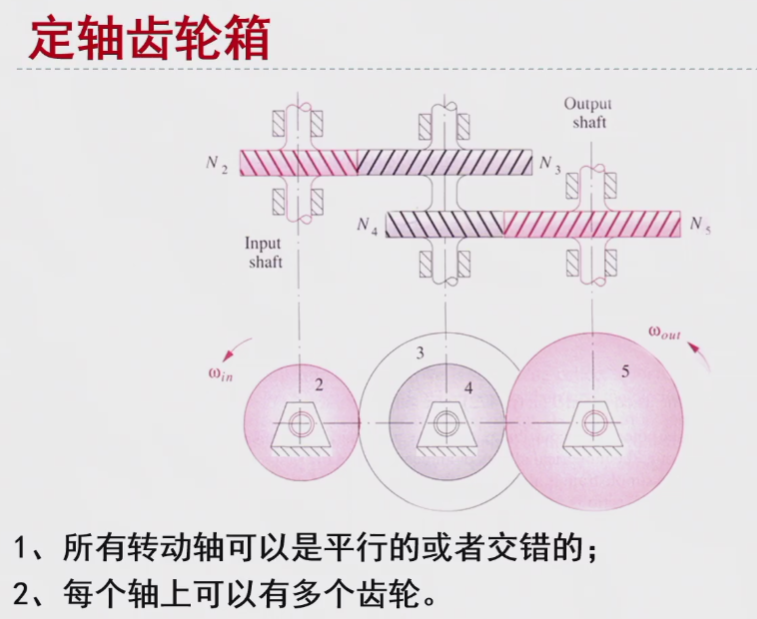
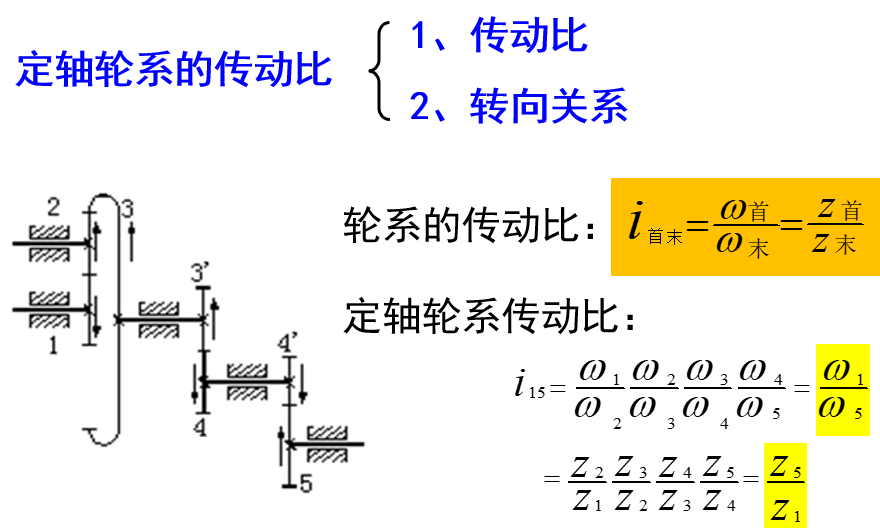
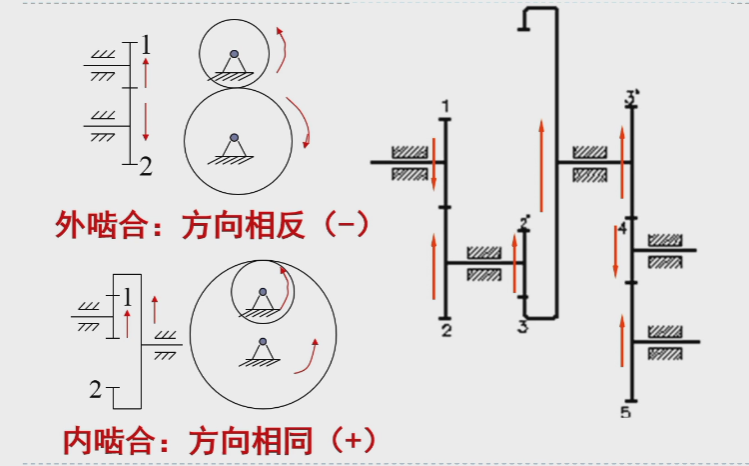
定轴传动 ¶
定轴轮系:所有转动轴可以是平行的或者交错的;每个轴上可以有多个齿轮。
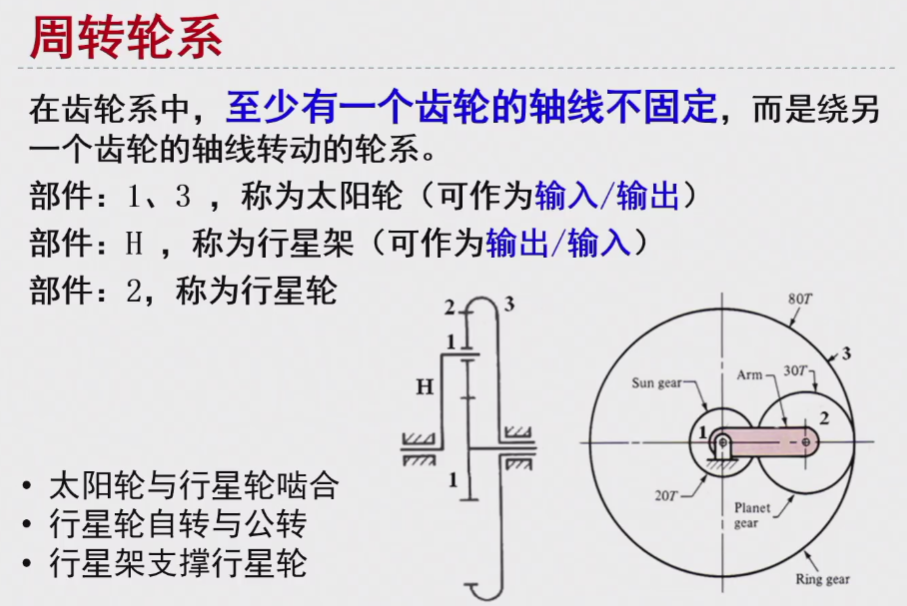
周转轮系 ¶
周转轮系:至少有一个齿轮的轴线不固定 ,而是绕另一个齿轮的轴线转动的轮系。
减速比计算(重点)¶
方向关系 ¶
连杆传动 ¶
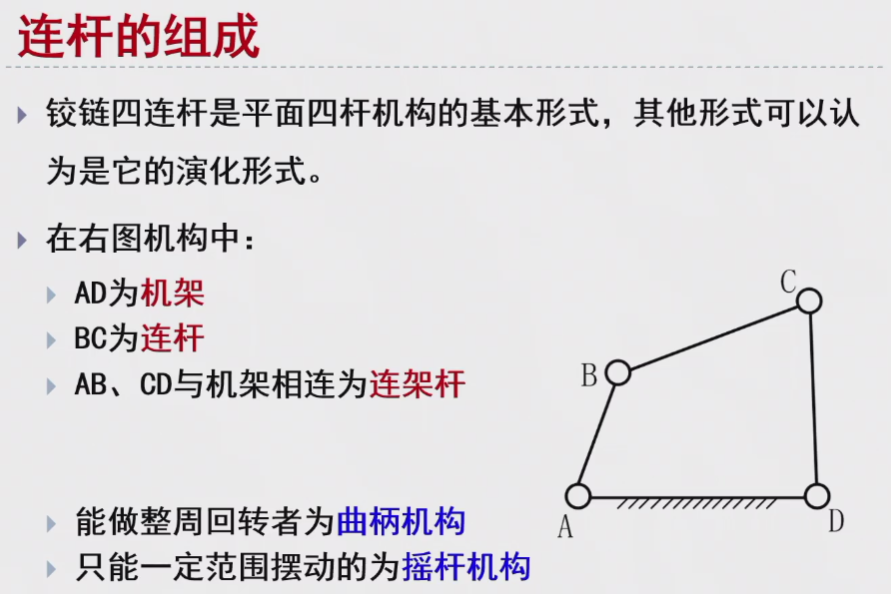
AB 当做输入,CD 当做输出,则 BC 就是一个连杆
优缺点(重点)¶
优点:
- 连杆机构中的运动副一般均为低副(连杆机构也称低副机构)低副元素之间为面接触,压强较小,承载能力较大;
- 可改变各构件的 长度使得从动件得到不同的运动规律;
- 可以设计出各种曲线轨迹。
缺点:
- 需要经过中间构件传递运动,传递路线较长,易产生较大的误差,同时,使得机械效率降低
- 质心在作变速运动,所产生的惯性力难于用一般平衡方法加以消除,易增加机构的动载荷, 不适宜高速运动(相对于齿轮而言)
分类 ¶
分类方法:看哪一根杆最短
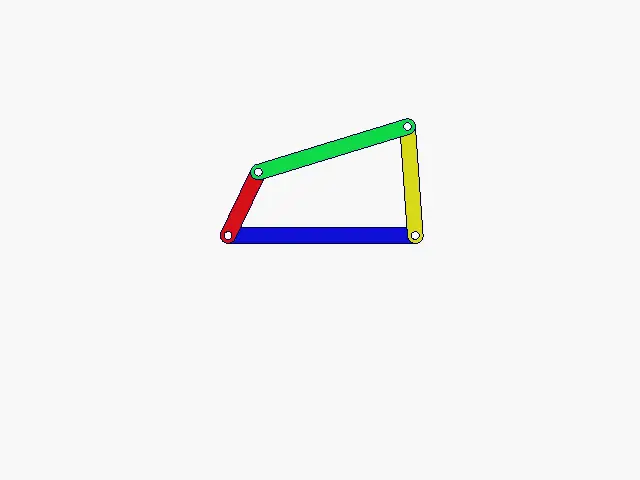
基本形式一:曲柄摇杆机构
斜边最短的时候,是曲柄摇杆机构
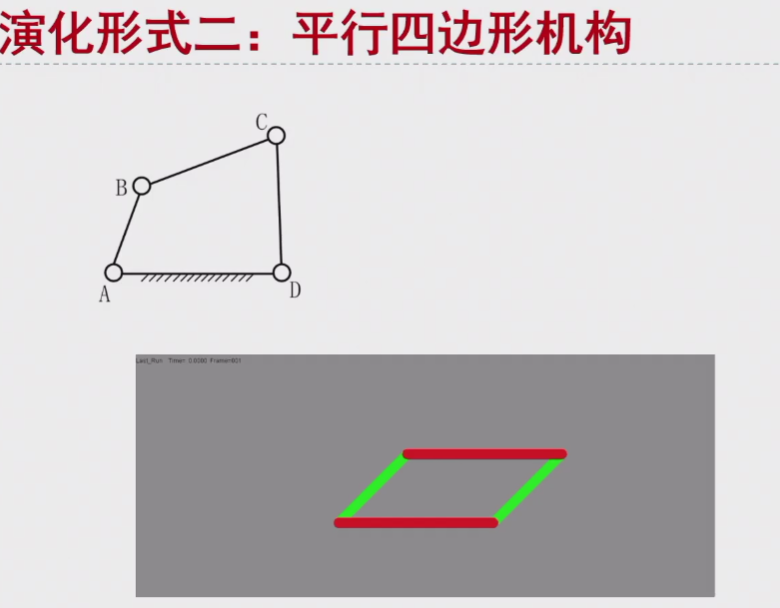
基本形式二:双曲柄机构
最短杆为机架时候
基本形式三:双摇杆机构
最短杆为连杆
证明方法:三角形两边之和大于第三边
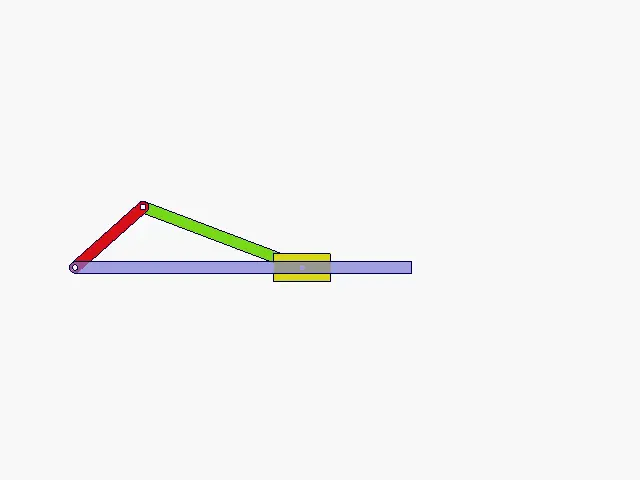
曲柄滑块
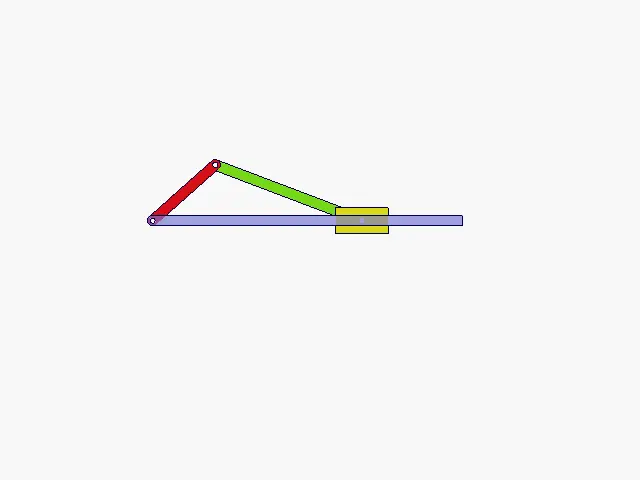
对心曲柄滑块机构
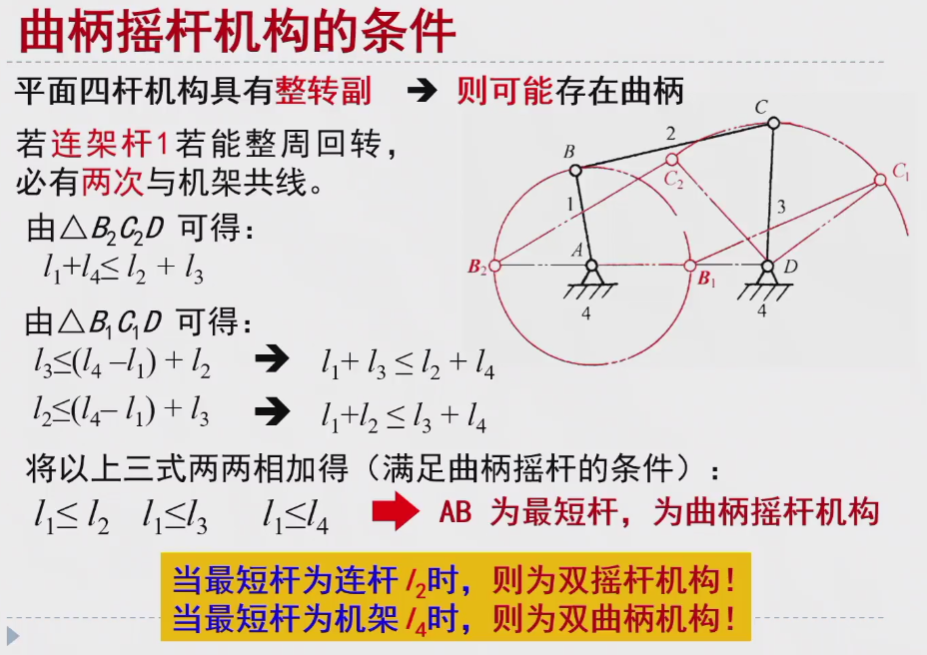
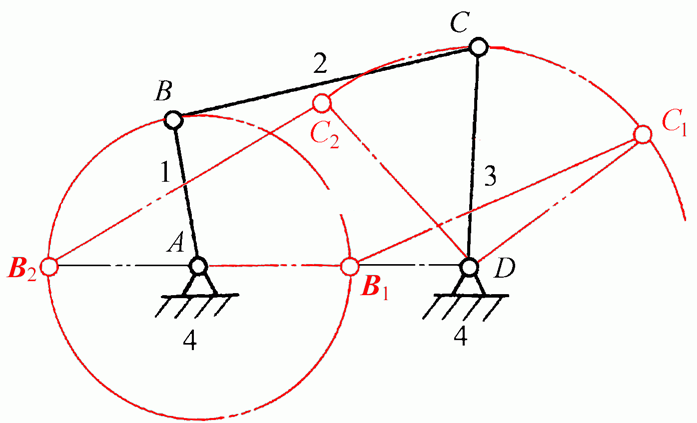
曲柄摇杆机构的条件
- 曲柄摇杆机构:两个连架杆中有一个为曲柄,另一个为摇杆:最短杆为连架杆 1 时
- 双曲柄机构:两个连架杆均为曲柄:最短杆为机架 4 时
- 双摇杆机构:两个连架杆均为摇杆:最短杆为连杆 2 时
矢量方程法 ( 不重要 ) ¶
步骤 ¶
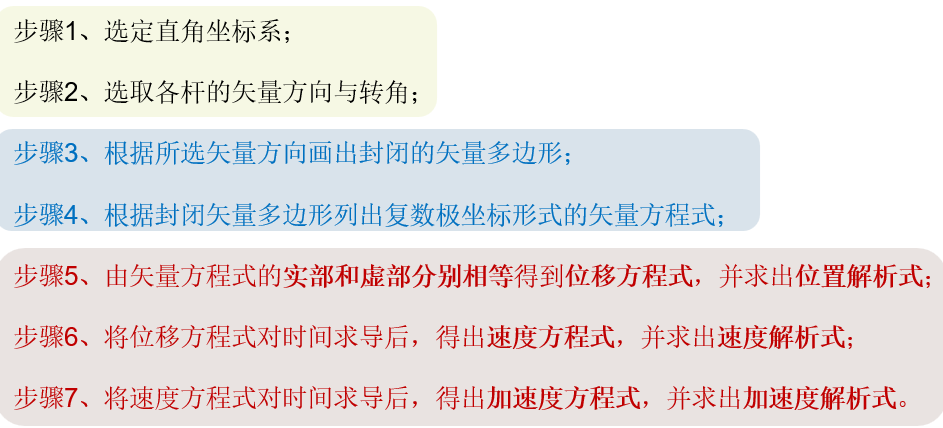
- 总的来说就是列写矢量方程
- 再按照实部和虚部相等列写两个方程求解
- 速度与加速度对位移方程求导即可
曲柄滑块机构 ¶
位移分析
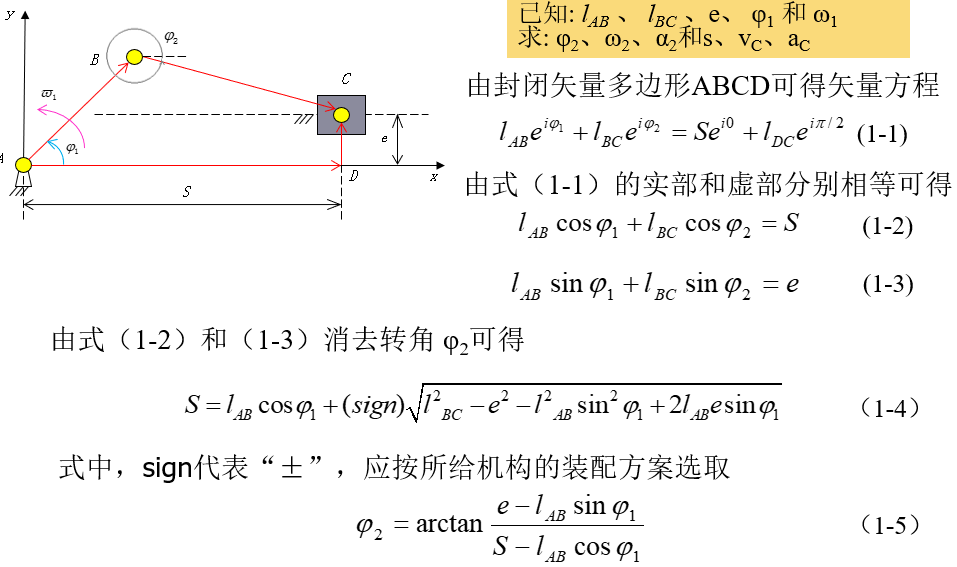
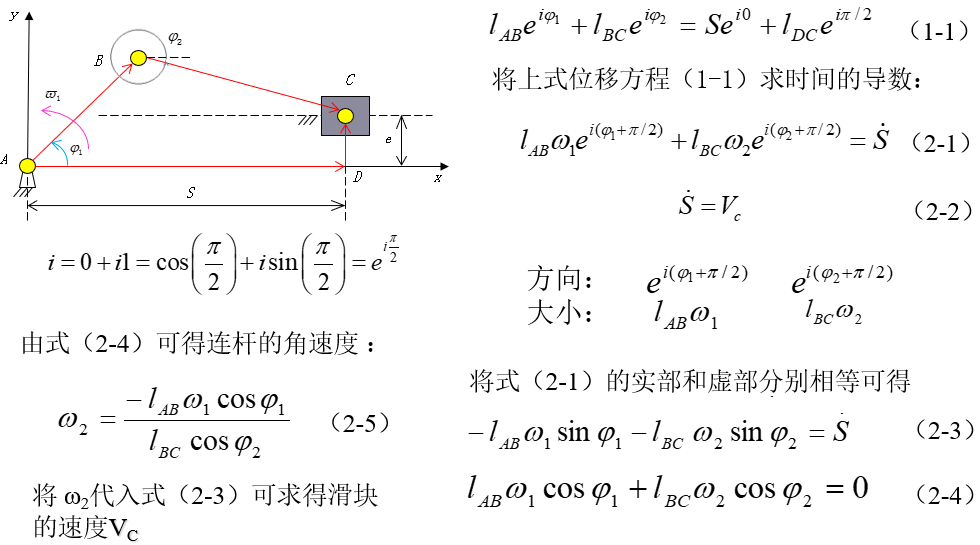
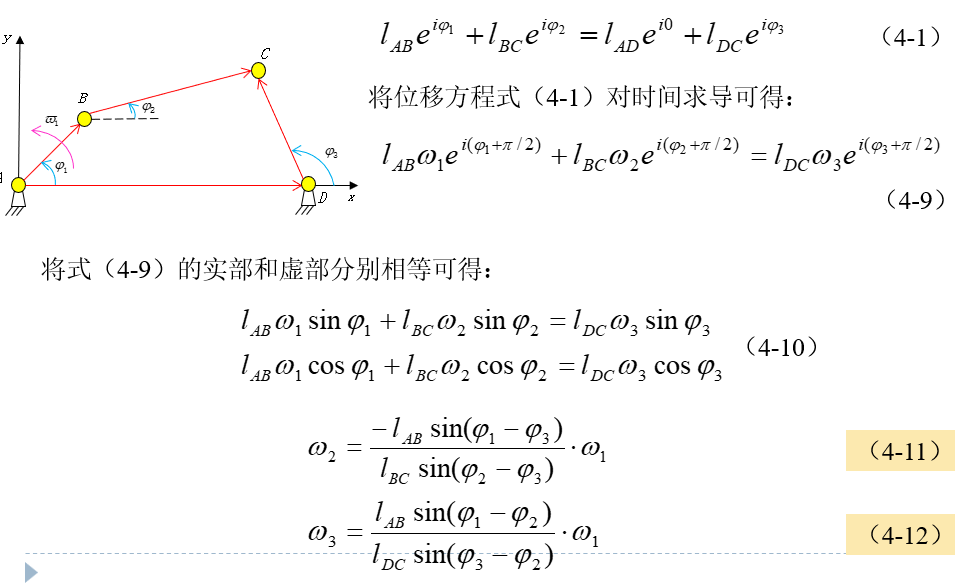
速度分析(位移求导)
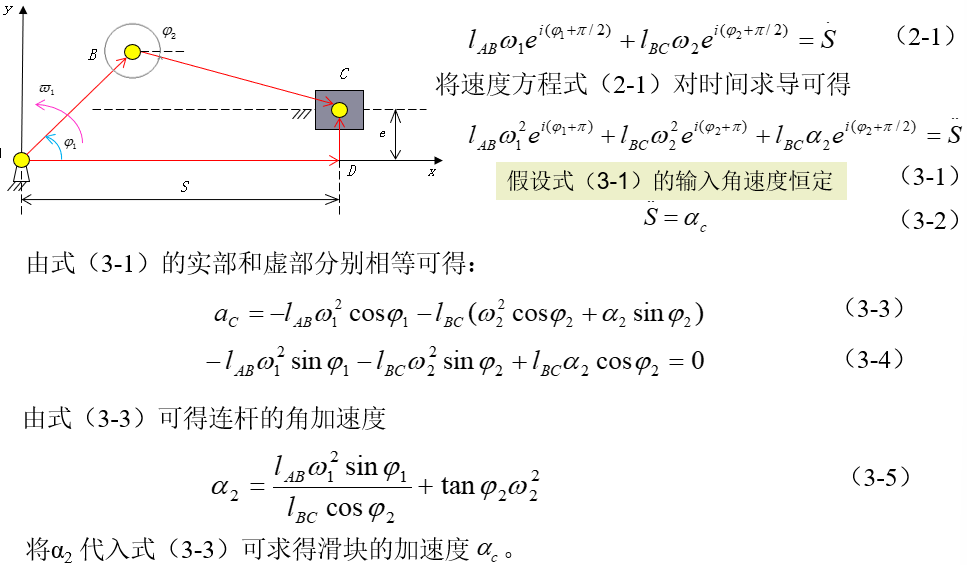
加速度分析
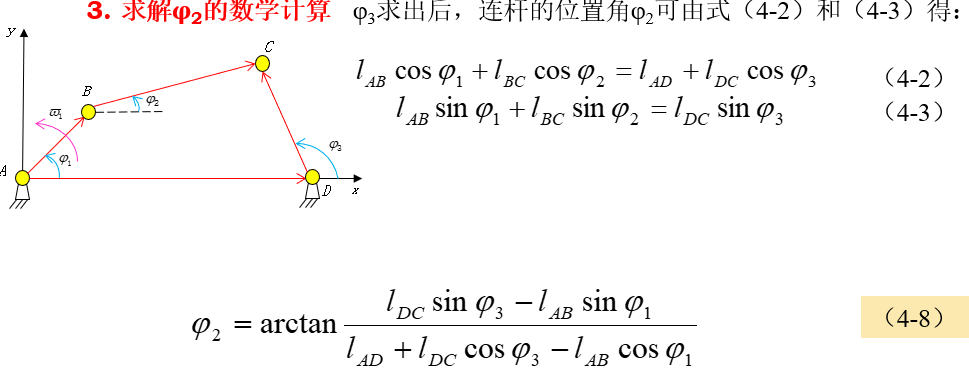
曲柄摇杆机构 ¶
位置分析
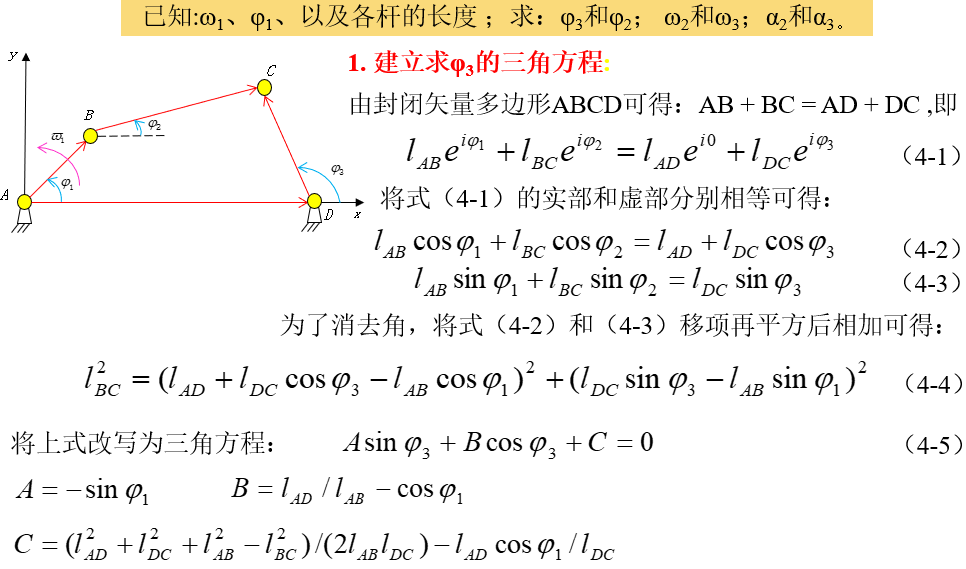
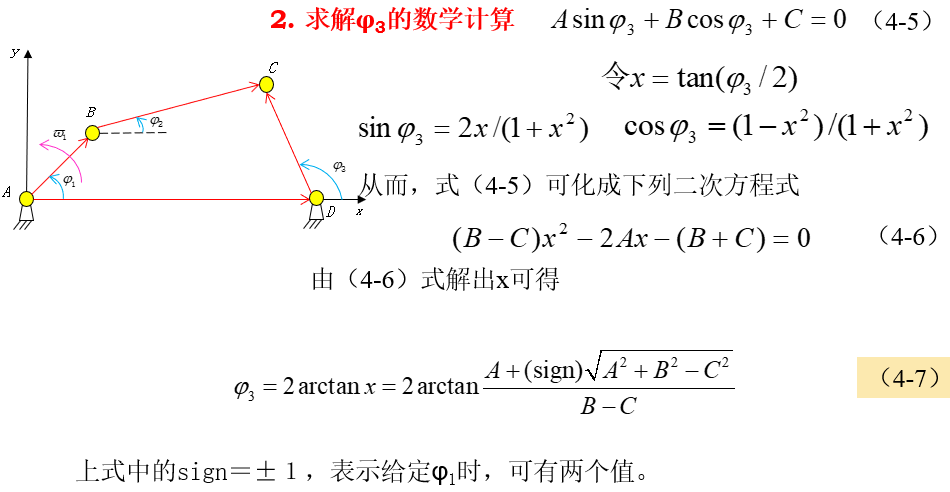
速度分析
滑轮组 ¶
- 固定轮只能用于改变力的方向,而运动轮可以降低输入力量的大小
- 通过动滑轮,可以实现两倍的运动距离,但是需要的力矩需要增加一倍。
带传动 ¶
结构简单、传动平稳、造价低廉以及缓冲吸振
链传动 ¶
是依靠链齿轮齿与链节的啮合来传递运动和动力,但在运转时不能保证瞬时传动比
同步带 ¶
- 综合了带传动和链传动的优点
- 避免采用润滑油对橡胶材料的皮带进行润滑,易造成橡胶的膨胀,导致其网裂和硬化。
涡轮 - 蜗杆传动 ¶
- 传动比大,结构紧凑
- 传动平稳,噪声小。
- 具有自锁性。
凸轮机构 ¶
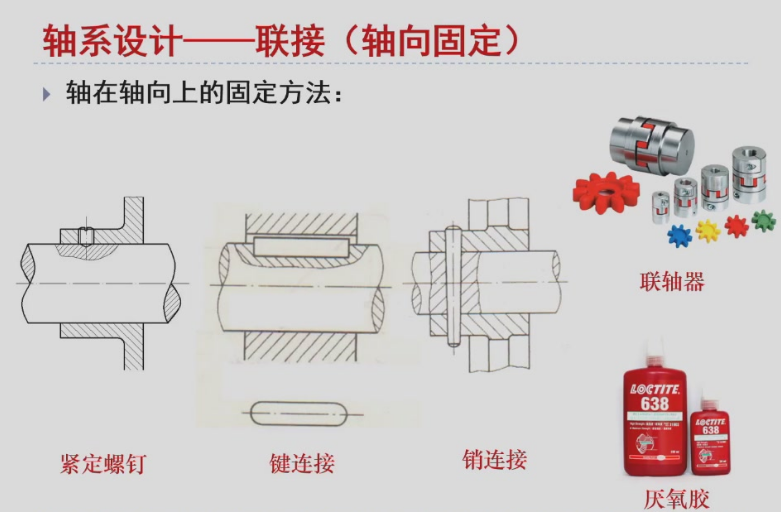
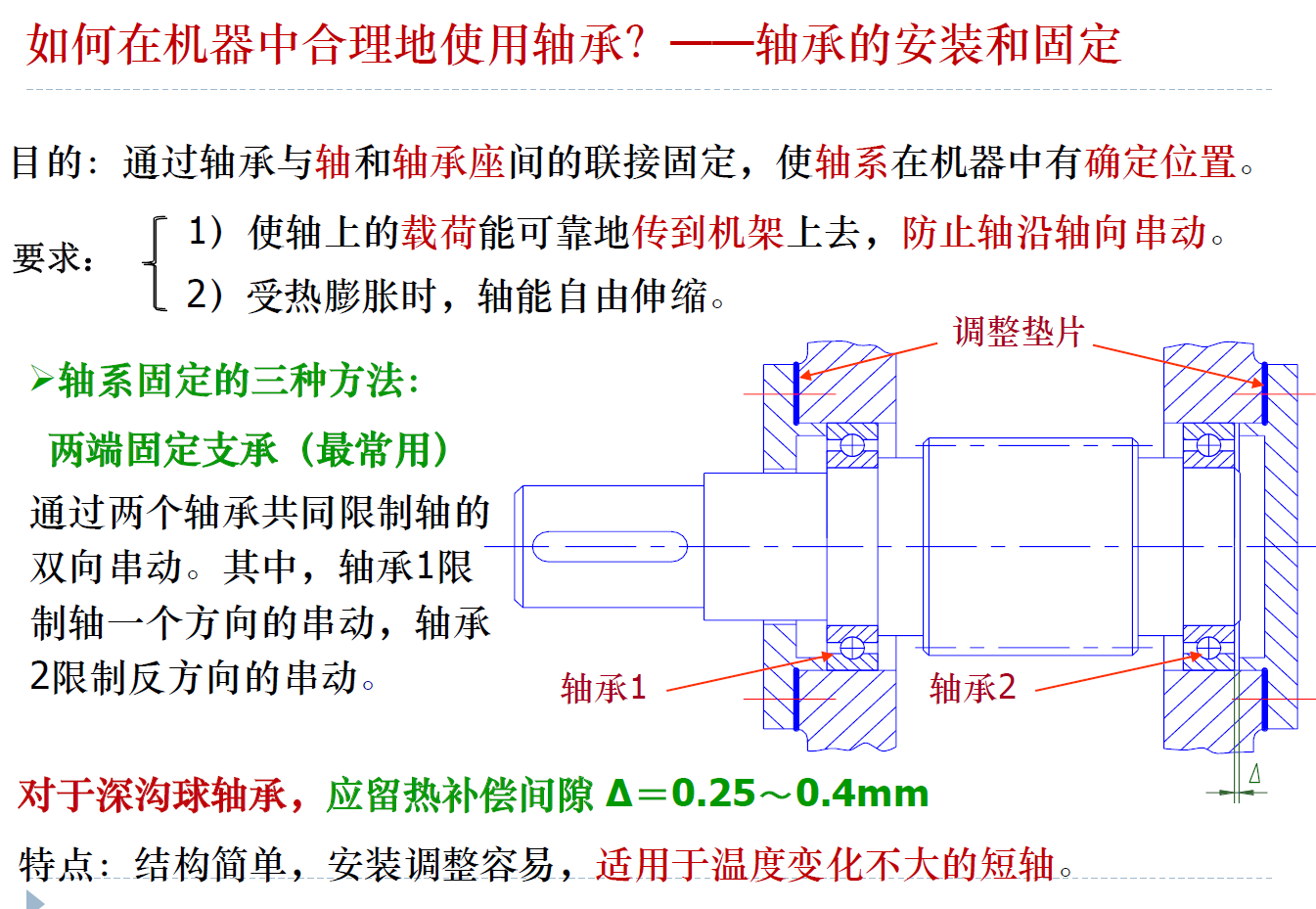
六、支撑与导向 ¶
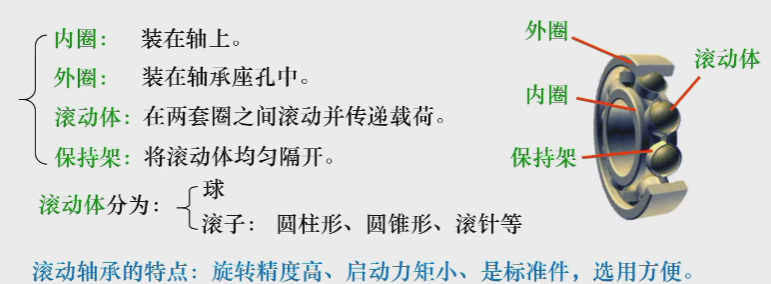
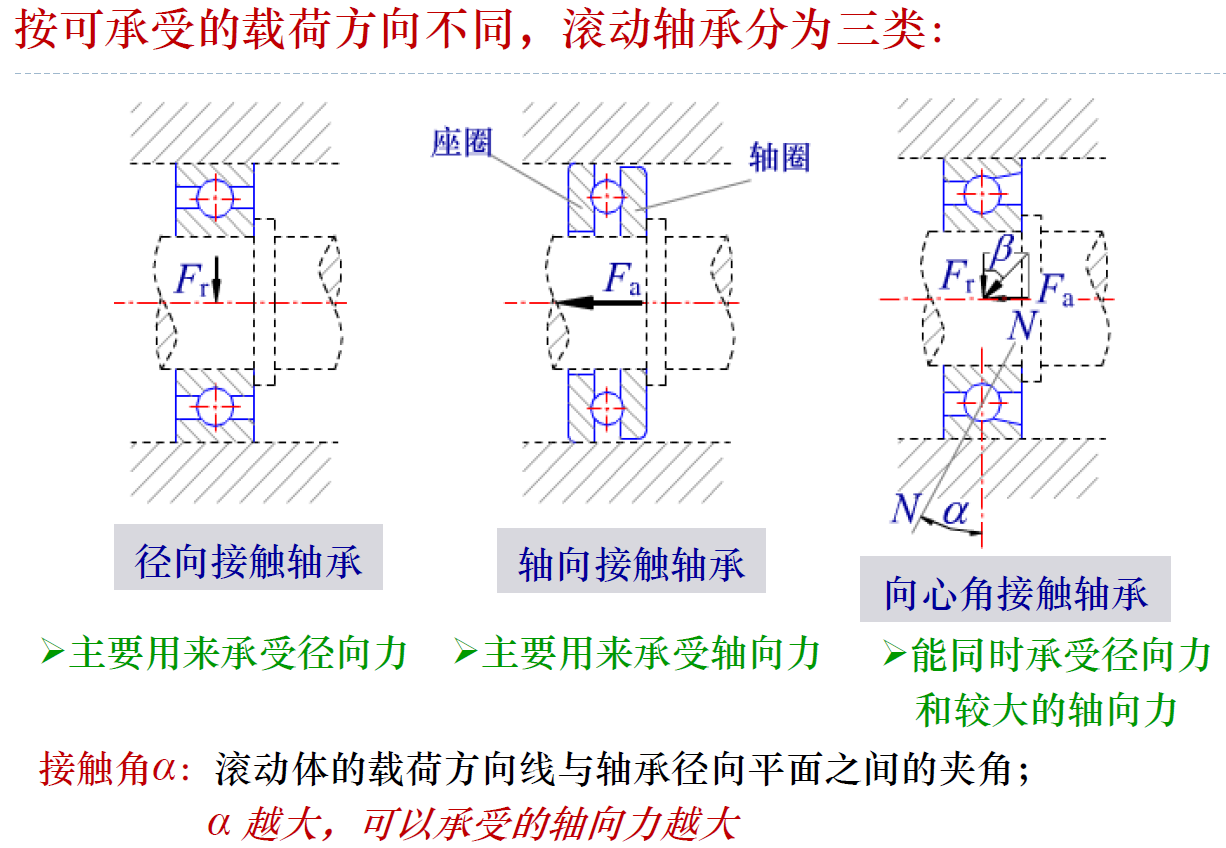
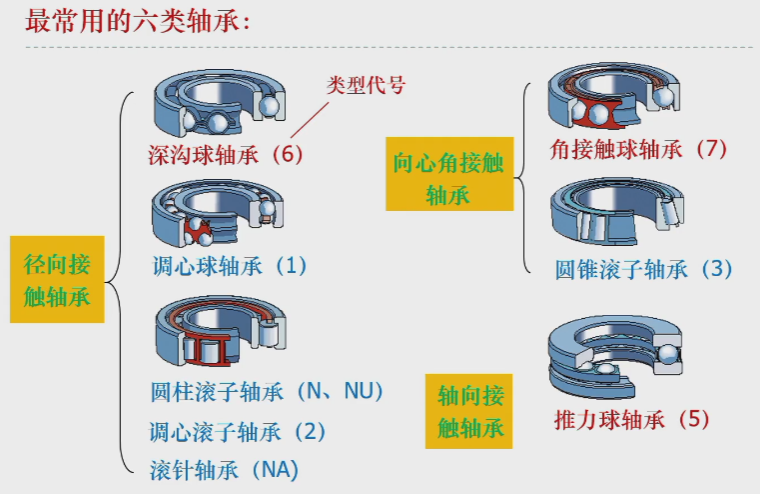
轴承 ¶
作用:用来支撑轴,使轴系有确定的位置
联接 ¶