06 | 动力学 ¶
约 4645 个字 预计阅读时间 18 分钟
有哪些力,有哪些运动(2x2 = 4 种组合)
- 关节空间的运动
- 末端执行器空间的运动
- 关节力 / 力矩
- 末端执行器力 / 力矩
有了运动学,为什么还需要动力学?
运动学可以让我们很好地完成如 Pick and Place 这一类任务,但是对于画一个圆这类的轨迹跟踪任务,运动学就无能为力了
动力学的引入允许我们更快、更精确地跟随需要的轨迹
没有动力学加入控制回路的机器人能做的事情非常有限,它们速度无法做到很快、负载不能做很重、如果功率很大会非常危险。
动力学的目标:如果我们需要控制机器人按照一定的轨迹运动(别忘了轨迹是位置对时间的函数
而这一章主要讲解牛顿 - 欧拉迭代动力学方程和拉格朗日动力学方程。
其中,牛顿欧拉方法需要掌握一些刚体力学的知识,拉格朗日方法需要掌握一些分析力学的知识。
前置知识 —— 刚体力学基础 ¶
| linear | angular | |
|---|---|---|
| 惯性 | 质量 \(m\) | 张量 \(\mathbf{I}\) |
| 动量 | \(m\mathbf{v}\) | \(\mathbf{I}\boldsymbol{\omega}\) |
| 外力 | 力 \(\mathbf{F}\) | 力矩 \(\boldsymbol{\tau}\) |
| 加速度 | 线性加速度 \(\mathbf{a}\) | 角加速度 \(\boldsymbol{\alpha}\) |
| 欧拉方程 | \(\mathbf{F}=m\mathbf{a}\) | \(\boldsymbol{\tau}=\mathbf{I}\boldsymbol{\alpha}+\boldsymbol{\omega}\times\mathbf{I}\boldsymbol{\omega}\) |
叉乘运算 ¶
两个向量 \(\vec{a}\) 和 \(\vec{b}\) 的叉乘结果是一个新向量 \(\vec{c}\):
方向遵循右手定则,垂直于这两个向量所在的平面。
计算方法 ¶
法一:神奇记忆法:
把 \(\vec{a}\) 和 \(\vec{b}\) 写成下面的矩阵形式
去掉第一列和最后一列,剩下的 3 个 2x2 的矩阵(每次滑动 1 格子
法 2: 写成 \(\mathbf{a} \wedge \mathbf{b}\) 的形式
证明:
性质 ¶
-
基本法则:
- 反交换律:\(\mathbf{a} \times \mathbf{b} = -\mathbf{b} \times \mathbf{a}\)
- 分配律:\(\mathbf{a} \times (\mathbf{b} + \mathbf{c}) = \mathbf{a} \times \mathbf{b} + \mathbf{a} \times \mathbf{c}\)
- 标量兼容性:\(\lambda (\mathbf{a} \times \mathbf{b}) = (\lambda \mathbf{a}) \times \mathbf{b} = \mathbf{a} \times (\lambda \mathbf{b})\)
-
几何意义:
- 模长:\(|\mathbf{a} \times \mathbf{b}| = |\mathbf{a}||\mathbf{b}|\sin\theta\),\(\theta\) 为两向量夹角,对应以 \(\mathbf{a}, \mathbf{b}\) 为邻边的平行四边形面积。
- 方向:垂直于 \(\mathbf{a}\) 和 \(\mathbf{b}\) 所在平面,遵循右手定则(四指从 \(\mathbf{a}\) 转向 \(\mathbf{b}\),拇指方向为结果方向
) 。
-
混合运算:
- 混合积:\((\mathbf{a} \times \mathbf{b}) \cdot \mathbf{c}\) 表示平行六面体体积,满足轮换对称性:\((\mathbf{a} \times \mathbf{b}) \cdot \mathbf{c} = (\mathbf{b} \times \mathbf{c}) \cdot \mathbf{a} = (\mathbf{c} \times \mathbf{a}) \cdot \mathbf{b}\)
- 拉格朗日公式:\(\mathbf{a} \times (\mathbf{b} \times \mathbf{c}) = \mathbf{b}(\mathbf{a} \cdot \mathbf{c}) - \mathbf{c}(\mathbf{a} \cdot \mathbf{b})\)
欧拉第一定律 —— 惯性系 ¶
欧拉第二定律 —— 角动量 ¶
力矩:\(\tau = r \times F\)
特别注意叉乘的顺序
惯性张量 ¶
- 转动惯量是绕着某个轴的,而惯性张量是绕着某个点的。
- 转动惯量是标量,惯性张量是矩阵。
- 三个对角元素 \(I_{xx}, I_{yy}, I_{zz}\)( 称为惯性矩 );\(I_{xx}\) 对应绕 x 轴转动惯量,\(I_{yy}\) 对应绕 y 轴转动惯量,\(I_{zz}\) 对应绕 z 轴转动惯量。
- 非对角元素称为惯性积
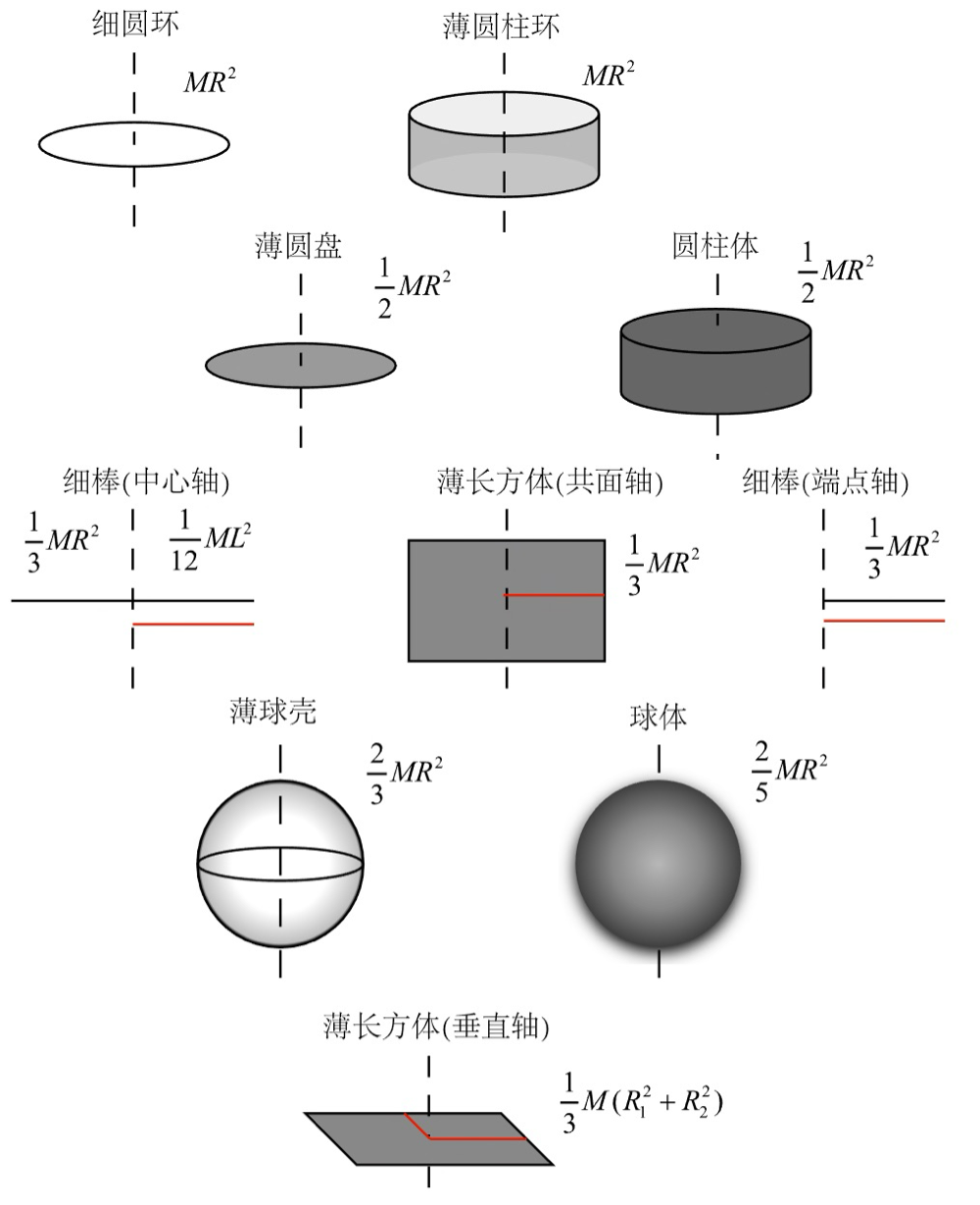
常见的转动惯量
积分 trick ¶
请务必回顾一下微积分下当中多元积分相关的内容,不然这部分会影响理解
多元积分
- 画出积分区域
- 确定上下左右限
- 写出累次积分
- 逐个计算定积分
极坐标换元
对称性
- 对称性
: (\(y=x\) 对称) - 奇偶性:x 轴,y 轴等;利用被积函数奇偶性
方法:拆分函数;拆分积分域;画辅助线
平移 ¶
平行移轴定理
旋转 ¶
假设物体的质心在坐标系 \(0\) 中为 \(O_0\),在坐标系 \(b\) 中为 \(O_b\)
物体的转动惯量在坐标系 \(i\) 中为 \(I^b\),物体的转动惯量在坐标系 \(0\) 中为 \(I^0\)。
证明
动能这个标量在不同坐标系下是一致的,可以有下面的式子
$$ T = frac{1}{2}({0}omegaT)({0}I)(omega) $$
$$ T = frac{1}{2}({b}omegaT)({b}I)(omega) $$
展开第一个式子,有
$$ begin{align} T &= frac{1}{2}({0}omegaT)({0}I)(omega)\ &= frac{1}{2}({b}Romega)T(I)({0}Romega)\ &= frac{1}{2}({b}omegaT)({b}RT)({0}I)(omega) end{align}R)(^{b} $$
所以
$$ {}^{b}I = ({}{0}RT)({}{0}I)({}R) $$
进一步,两边左乘 \(({}^{0}R)\),右乘 \(({}^{b}R^T)\),可得:
$$ {}^{0}I = ({}{0}R)({}}I)({{0}RT) $$
牛顿欧拉法迭代动力学方程 ¶
先进行外推,再进行内推
先进行外推,得到每个连杆的加速度、质心加速度: 目的是根据牛顿 - 欧拉方程,计算出每个连杆的力和力矩
$$ begin{align} F_{i}&=m_{i}dot{boldsymbol{v}}{i}\ N}&=I_{Ci}dot{boldsymbol{omega}{i}+boldsymbol{omega} end{align}times I_{Ci}boldsymbol{omega}_{i} $$
再进行内推,得到每个关节的力和力矩。
推导机械臂动力学的牛顿欧拉法是一个递归算法
注意旋转关节 R 和平移关节 P 的公式区别
外推 ¶
平动
| 物理量 | 公式 |
|---|---|
| 角速度 | \(^{i+1}\omega_{i+1} = {}^{i+1}_i R \cdot {}^i \omega_i\) |
| 角加速度 | \(^{i+1}\dot{\omega}_{i+1} = {}^{i+1}_i R \cdot {}^i \dot{\omega}_i\) |
| 加速度 | \(^{i+1}\dot{v}_{i+1} = {}^{i+1}_i R \left[ {}^i \dot{\omega}_i \times O_{i+1} + {}^i \omega_i \times \left( {}^i \omega_i \times ^iO_{i+1} \right) + {}^i \dot{v_i} \right] + 2 \cdot {}^{i+1} \omega_{i+1} \times \dot{d}_{i+1} ^{i+1} \hat{Z}_{i+1} \ + \ \ddot{d}_{i+1}\cdot {}^{i+1} \hat{Z}_{i+1}\) 注意这里不是 \(2^{i+1}\), 不要看错 |
| 质心加速度 | \(^{i+1}\dot{v}_{C_{i+1}} = {}^{i+1}_i \dot{\omega}_{i+1} \times {}^{i+1} P_{C_{i+1}} + {}^{i+1} \omega_{i+1} \times \left( {}^{i+1} \omega_{i+1} \times {}^{i+1} P_{C_{i+1}} \right) + {}^{i+1} \dot{v}_{i+1}\) |
| 力 | \(^{i+1} F_{i+1} = m_{i+1} \cdot {}^{i+1}_i \dot{v}_{C_{i+1}}\) |
| 力矩 | \(^{i+1}N_{i+1} = {}^{C_{i+1}} I_{i+1} \cdot {}^{i+1}\dot{\omega}_{i+1} + {}^{i+1} \omega_{i+1} \times{}^{C_{i+1}} I_{i+1} \cdot {}^{i+1} \omega_{i+1}\) |
转动
| 物理量 | 公式 |
|---|---|
| 角速度 | \(^{i+1}\omega_{i+1} ={}^{i+1}_i R \cdot {}^i \omega_i + \dot{\theta}_{i+1} \cdot {}^{i+1} \hat{Z}_{i+1}\) |
| 角加速度 | \(^{i+1}\dot{\omega}_{i+1} ={}^{i+1}_i R \cdot {}^i \dot{\omega}_i + {}^{i+1}_i R \cdot {}^i \omega_i \times \dot{\theta}_{i+1} \cdot {}^{i+1} \hat{Z}_{i+1} + \ddot{\theta}_{i+1} \cdot {}^{i+1} \hat{Z}_{i+1}\) |
| 加速度 | \(^{i+1}\dot{v}_{i+1} ={}^{i+1}_i R \left[ {}^i \dot{\omega}_i \times O_{i+1} + {}^i \omega_i \times \left( {}^i \omega_i \times {}^iO_{i+1} \right) + {}^i \dot{v_i} \right]\) |
| 质心加速度 | \(^{i+1}\dot{v}_{C_{i+1}} ={}^{i+1}_i \dot{\omega}_{i+1} \times {}^{i+1} P_{C_{i+1}} + {}^{i+1} \omega_{i+1} \times \left( {}^{i+1} \omega_{i+1} \times {}^{i+1} P_{C_{i+1}} \right) + {}^{i+1} \dot{v}_{i+1}\) |
| 力 | \(^{i+1} F_{i+1} =m_{i+1} \cdot {}^{i+1}_i \dot{v}_{C_{i+1}}\) |
| 力矩 | \(^{i+1}N_{i+1} ={}^{C_{i+1}} I_{i+1} \cdot {}^{i+1}\dot{\omega}_{i+1} + {}^{i+1} \omega_{i+1} \times{}^{C_{i+1}} I_{i+1} \cdot {}^{i+1} \omega_{i+1}\) |
注意事项
- 角速度初始值: \({}^0 \omega_0 = (0,0,0)^T\)
- 角加速度初始值: \({}^0 \dot{\omega}_0 = (0,0,0)^T\)
- 加速度初始值(含重力): \({}^0 v_0 = (0, g, 0)^T\)
为什么 \({}^0 v_0 = (0, g, 0)^T\)
这里在推导的时候没有考虑重力,是因为相当于考虑连杆坐标系 {0} 以加速度 \(G\) 运动,\(G\) 与重力大小相当,方向相反
这里需要了解一下惯性力的有关知识,惯性力是一个假想的力,其方向与加速度方向相反,大小为 \(m\cdot a\)
最简单的应用:高中物理,分离法进行受力分析,给物体施加一个惯性力,然后进行受力分析,有加速度的物体就可以看成是受力平衡的物体进行分析了
\(g\) 不在 z 轴的原因:因为书上是 RRR 的机械臂,转轴垂直于纸面,建系的时候重力在 y 轴方向而不是 z 轴方向,所以 \(g\) 不在 z 轴上
内推 ¶
连杆力 \({}^i f_i = {}_{i+1}^i R {}^{i+1} f_{i+1} + {}^i F_i\)
连杆力矩 \({}^i n_i = {}^i N_i + {}_{i+1}^i R {}^{i+1} n_{i+1} + {}^i P_{C_i} \times {}^i F_i + {}^i O_{i+1} \times {}_{i+1}^i R {}^{i+1} f_{i+1}\)
关节力 / 力矩
- 转动:\(\tau_i = {}^i n_i^T \cdot{}^i \hat{Z}_i\)
- 平动:\(\tau_i= {}^i f_i^T \cdot {}^i \hat{Z}_i\)
注意旋转关节 R 和平移关节 P 的公式区别
推导方法
静力平衡
对于一个连杆,一共有四个力,
所以可以计算出为了平衡,关节需要额外提供的力 / 力矩
$$ F_{i}=f_{i}-f_{i+1}\ N_{i}=n_{i}-n_{i+1}+(-p_{c})times f_{i}+(p_{i+1}-p_{c})times(-f_{i+1}) $$
注意,这里需要转化到一个坐标系下面计算,所以需要用到旋转矩阵
前置知识 —— 分析力学基础 ¶
- 拉格朗日力学
- 达朗贝尔原理
- 拉格朗日方程;拉格朗日关系
- 哈密顿力学
- 哈密顿原理
牛顿力学又称为矢量力学,基于相对性原理和伽利略变换。 但是在描述复杂系统(如单摆)的时候,比较复杂。所以使用广义坐标来描述系统的状态。
广义坐标:不是特定坐标,描述力学系统状态即可;
力学系统所受理想约束力所做的虚功为 0
达朗贝尔原理:拉格朗日力学中的第二个基本原理 ¶
没有约束的情况下,\(\delta \vec{r}_i\) 相互独立,所以前面系数为 0,即牛顿第二定律
拉格朗日方程:描述物体运动的方程 ¶
地位如同牛顿第二定律
- \(\delta\) 与 \(d\) 运算规则基本相同
- 消去的一个思路:利用广义坐标相互独立,所以系数为 0
- 另一个思路:矢量的化简比较复杂,标量化简较为简单
拉格朗日函数:\(L = T-U\) 只在保守系下成立,\(T\) 为动能,\(U\) 为势能
T: 动能 ,\(q_a\) 广义坐标,\(\dot{q}_a\) 广义速度,\(Q_a\) 广义力 , 广义动量 \(P_{\alpha} = \frac{\partial T}{\partial \dot{q_\alpha}}\)
保守体系下,完整系统的拉格朗日方程
泛函求极值;欧拉方程 ¶
欧拉 - 拉格朗日方程
欧拉方程是泛函求极值的一个条件,形式和保守体系下的拉格朗日方程类似。
所以隐含着:物体的运动对应着某个量取极值
哈密顿原理 ¶
系统的运动是使作用量 \(S\) 取得极值的运动,也就是说物理系统倾向于选择更省力、更节能的方式来运动
Hamiltonian:哈密顿量,系统的总能量
\(H = K+U\)
满足两个一阶微分方程
把运动化到了 face space 上面;知道了任意一点的位置和动量,就可以知道它的运动轨迹;
拉格朗日动力学方程 ¶
计算思路 1: 直接计算动能势能 ¶
动能
- 列写质心的坐标,对关节求偏导得到 \(J_v\)
- 使用列写世界坐标系下各 z 轴的方法得到 \(J_\omega\)
势能
就直接列写连杆的质心和关节的重力势能即可
计算思路 2: 矩阵 ¶
- 首先计算雅可比矩阵、旋转矩阵、惯性张量,这一步非常重要且基础,后续的计算都依赖于这一步 ,
算错的话可能一两个小时白干 - 计算 \(\boldsymbol{M}(\boldsymbol{\Phi})\), \(\boldsymbol{C}(\boldsymbol{\Phi},\dot{\boldsymbol{\Phi}})\) 和 \(\boldsymbol{G}(\boldsymbol{\Phi})\)
- 带入公式,求解动力学方程
每一项的计算方法如下:
- \(\boldsymbol{M}(\boldsymbol{\Phi})=\sum_{i=1}^{N}(m_{i}(\boldsymbol{J}_{P}^{(i)})^{\mathrm{T}}\boldsymbol{J}_{P}^{(i)}+(\boldsymbol{J}_{0}^{(i)})^{\mathrm{T}0}\boldsymbol{R}^{C_{i}}\boldsymbol{I}_{ii}^{0}\boldsymbol{R}^{\mathrm{T}}\boldsymbol{J}_{0}^{(i)})\),M 一般可以化简,如果形式太过复杂,观察一下有没有正负号写错了
- \(\boldsymbol{C}(\boldsymbol{\Phi},\dot{\boldsymbol{\Phi}})= \left.\left(\begin{array}{ccccccc}\sum_{k}c_{k11}\dot{\phi}_{k}&\sum_{k}c_{k21}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kj1}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kN1}\dot{\phi}_{k}\\\sum_{k}c_{k12}\dot{\phi}_{k}&\sum_{k}c_{k22}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kj2}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kN2}\dot{\phi}_{k}\\\vdots&\vdots&&\vdots&&\vdots\\\sum_{k}c_{k11}\dot{\phi}_{k}&\sum_{k}c_{k21}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kj1}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kNi}\dot{\phi}_{k}\\\vdots&\vdots&&\vdots&&\vdots\\\sum_{k}c_{k1N}\dot{\phi}_{k}&\sum_{k}c_{k2N}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kjN}\dot{\phi}_{k}&\cdots&\sum_{k}c_{kNN}\dot{\phi}_{k}\end{array}\right.\right)\)
- \(c_{jki}=\frac{1}{2}\left(\frac{\partial m_{ik}}{\partial\phi_{j}}+\frac{\partial m_{ij}}{\partial\phi_{k}}-\frac{\partial m_{kj}}{\partial\phi_{i}}\right)=c_{kji}\)
- \(G(\boldsymbol{\Phi})=\binom{g_1(\boldsymbol{\Phi})}{g_N(\boldsymbol{\Phi})}\), 其中 \(g_i(\boldsymbol{\Phi})=\frac{\partial u}{\partial\phi_i}=-\sum_{j=1}^Nm_j^0g^\mathrm{T} \frac{\partial^0\boldsymbol{P}_{C_j}}{\partial\phi_i}\)
- \(B=\mathrm{diag}(\begin{array}{ccc}b_1&\cdots&b_N\end{array})\),\(b_i\) 为折算到关节 \(i\) 的粘性摩擦参数 (Viscous Friction Coefficient)
物理含义 ¶
- 质量矩阵:
- 对角元素:它正是由每个关节自身加速运动(驱动所有在其之后的连杆加速运动)所需要的扭矩
- 非对角:其他关节加速运动(造成其之后的连杆加速运动)对这个关节的影响叠加而成 . 反映的正是第二个关节运动时第一个关节需要承担的惯性力
例子
题目 1 RP 机械臂
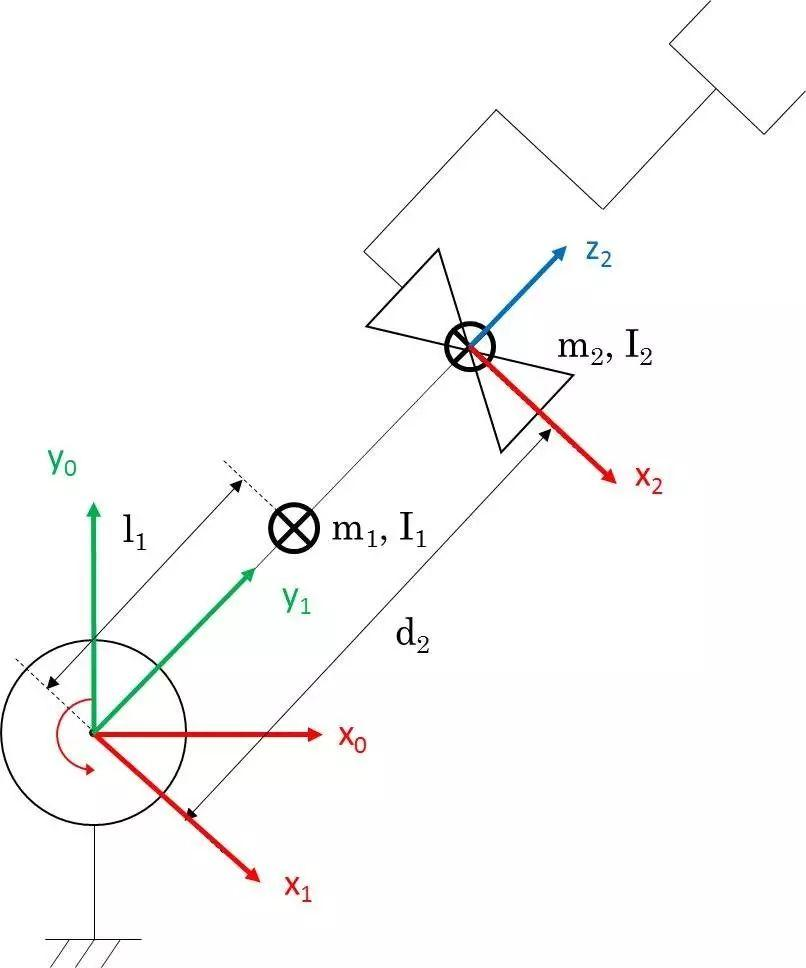
$$ ^0J_{v1} = begin{bmatrix} -l_1 sin theta_1 & 0 \ l_1 cos theta_1 & 0 \ 0 & 0 end{bmatrix}; ^0J_{v2} = begin{bmatrix} -d_2 sin theta_1 & cos theta_1 \ d_2 cos theta_1 & sin theta_1 \ 0 & 0 end{bmatrix} $$
$$ ^{c_1}J_{omega1} = begin{bmatrix} 0 & 0 \ 0 & 0 \ 1 & 0 end{bmatrix}; ^{c_2}J_{omega2} = begin{bmatrix} 0 & 0 \ 0 & 0 \ 1 & 0 end{bmatrix} $$
注意这里我们求的不是 end effector 的雅可比矩阵,而是每一根连杆的质心的运动相对于关节运动的雅可比矩阵(在求解时可以把质心当作 end effector 来理解
$$ M = begin{bmatrix} m_1 l_1^2 + I_{zz1} + m_2 d_2^2 + I_{zz2} & 0 \ 0 & m_2 end{bmatrix} $$
题目 2 PRR 机械臂

$$ M=begin{bmatrix}m_1+m_2+m_3××\times&l_{zz2}+m_2l_22+l_{zz3}+m_3({a_2}2+{l_3}^2+2a_2l_3cos q_3)×\times×&l_{zz3}+m_3l_3^2end{bmatrix} $$
$$ M=begin{bmatrix}times&m_2l_2c_2+m_3(l_3c_2c_3+a_2c_2-l_3s_2s_3)&-m_3(l_3s_2s_3-l_3c_2c_3)\times×&l_{zz3}+m_3(l_3^2+a_2l_3c_3)\times××end{bmatrix} $$
- 科里奥利力与离心力矩阵:
性质 ¶
- \(\dot{\boldsymbol{M}}(\boldsymbol{\Phi})-2\boldsymbol{C}(\boldsymbol{\Phi},\dot{\boldsymbol{\Phi}})\) 是反对称的
- 惯性矩阵 \(\boldsymbol{M}(\boldsymbol{\Phi})\) 是正定的,因为机器人的总动能是非负的,所以惯性矩阵是正定的
题目 ¶
动力学方程求解 ¶
个人倾向于拉格朗日方法直接列写动能势能
其他方法需要注意带对公式、耐心计算
惯性张量相关 ¶
学会积分
均质圆柱 , 原点位于质心 \(Z\) 重合于转轴 , 求 \(I_{xy},I_{zz}\)