STM32¶
约 2671 个字 86 行代码 24 张图片 预计阅读时间 12 分钟
history¶
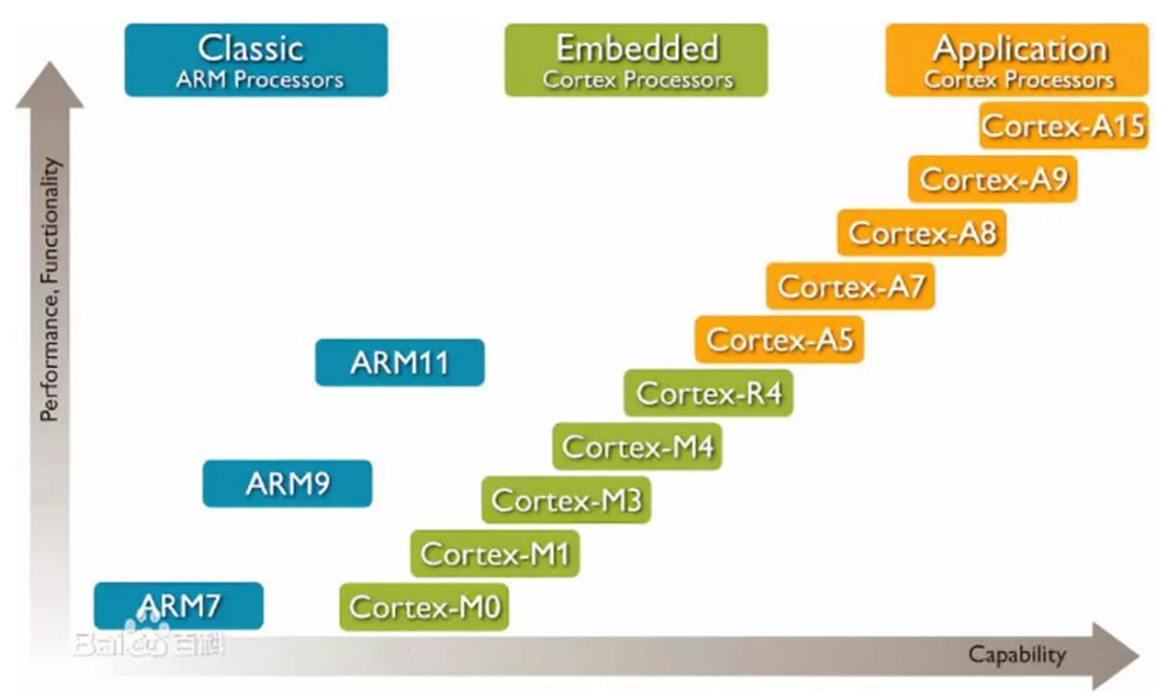
- 成立于 1990 年,总部在英国剑桥,目前拥有员工 2000 多名,分布在全球的 32 个分支机构。全称是 Advanced RISC Machines Limited 。
- ARM 是全球领先的半导体知识产权 (IP,intellectual property) 提供商,没有硬件,没有软件,只有图纸上的知识产权,设计了大量高性能、廉价、低耗能的 RISC 处理器。
内核 ¶


-
处理器内核
-
与处理器内核紧密结合的嵌套向量中断控制器(NVIC)以实现低延迟的中断处理
- 存储器保护单元(MPU
) ,可选部件 MPU 实现存储器保护 - 总线接口
- 调试接口
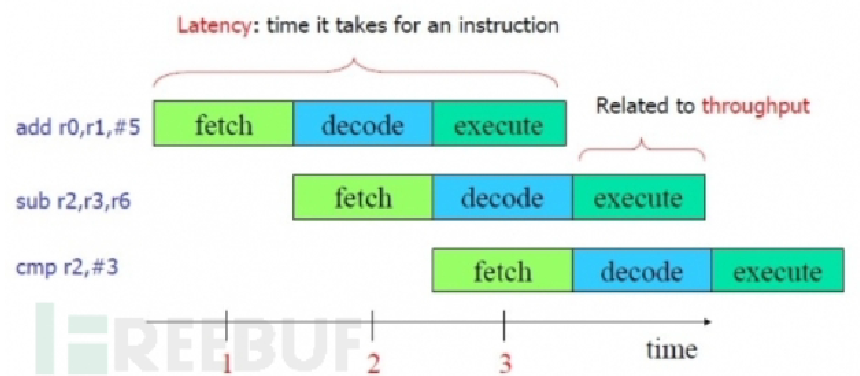
3 级流水线 ¶
- 取指令 (fetch)、译码 (decode) 和执行 (execute)
- 为什么可以用:三部分需要的资源是不一样的
在执行一条指令的同时对下一条指令进行译码,并将第三条指令从存储器中取出。可以显著提高效率
联想到计网中的发送端的流水线机制
PC 指向正在取址命令的地址,以正在执行的代码为参考点,则 PC 一直指向第三条指令
PC = 当前指令位置 +8(两个指令)
| 流水线上各指令的地址 | 流水线工位 | 描述 | |
|---|---|---|---|
| ARM 指令集 | Thumb 指令集 | ||
| PC | PC | 取指 | 指令从存储器中取出 |
| PC-4 | PC-2 | 译码 | 对指令使用的寄存器进行译码 |
| PC-8 | PC-4 | 执行 | 从寄存器组中读出寄存器,执行移位和 ALU 操作,寄存器被写回到寄存器组中 |
支持指令集:thumb2 不支持 arm
工作模式 ¶
- 线程模式和处理模式
普通应用程序(线程模式)和中断服务程序(处理模式
- 特权级和用户级
用于存储器访问的保护机制。普通的用户程序不能意外地,甚至是恶意地执行涉及到要害的操作
- 在 CM3 运行主程序(后台程序)时是线程模式,既可以使用特权级,也可以使用用户级;
- 中断 ( 异常 ) 服务程序必须在处理模式(始终特权级)下执行;
- 复位后,mcu 默认进入线程模式,特权极访问。
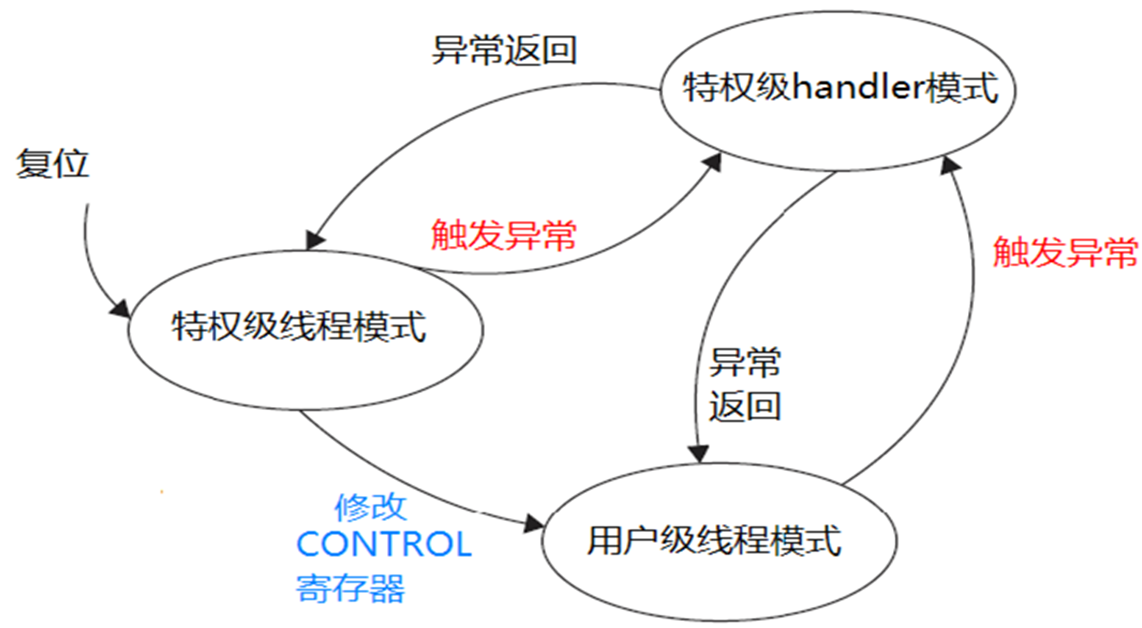
特权级:该级别的程序可以访问所有范围的存储器,并且可以执行所有指令;
用户级:用户级程序不能直接改写 CONTROL 寄存器,需执行一条系统调用指令 (SVC),由异常服务例程修改 CONTROL 寄存器,才能在用户级的线程模式下重新进入特权级。
存储器保护单元 MPU
MPU 是保护内存的一个组件
存储器与映射 ¶
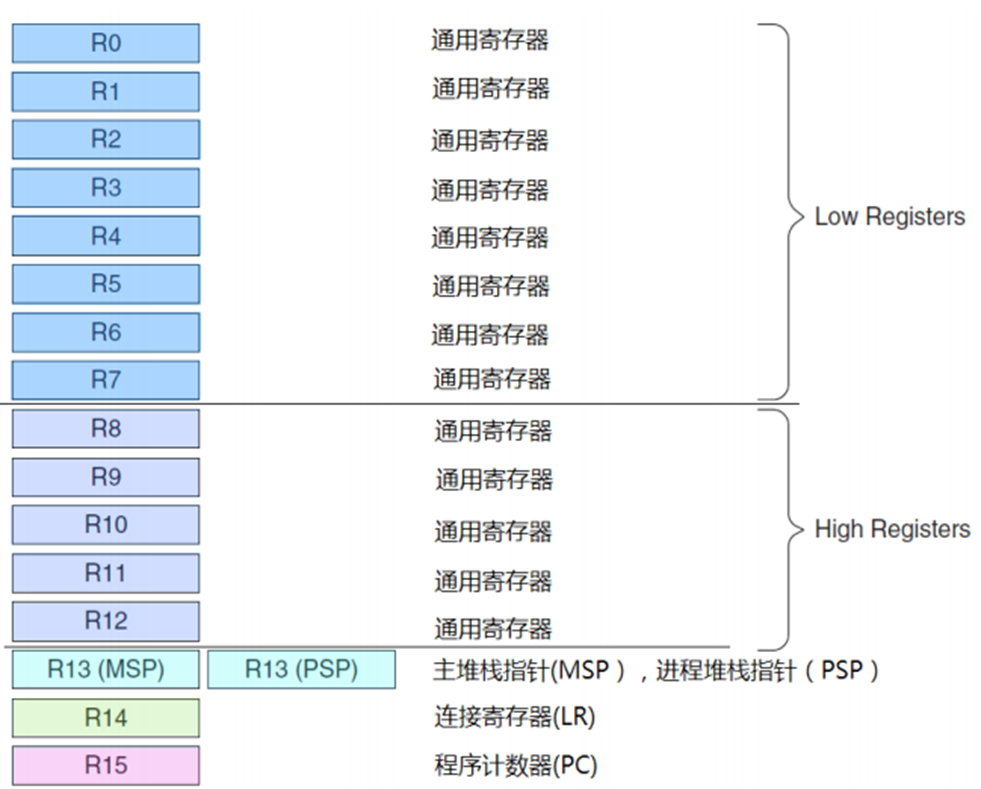
R13 R14 R15 比较重要
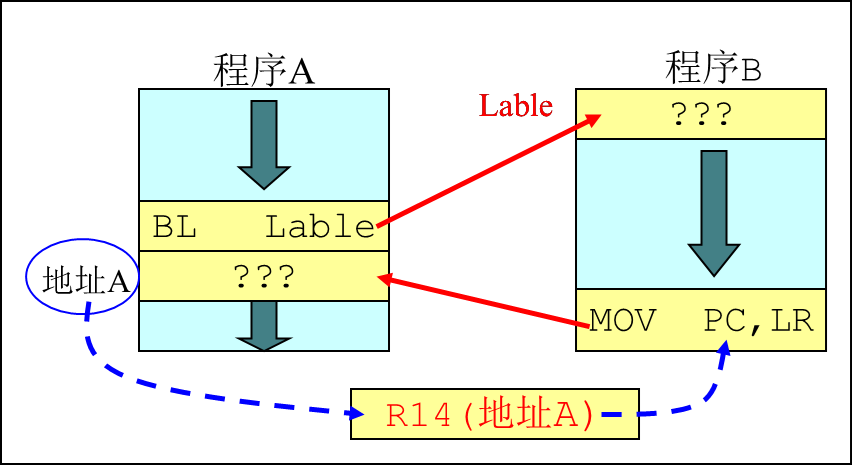
- R14 连接寄存器:用于存放子程序的返回地址调用
程序 B 执行最后,将 R14 寄存器的内容放入 PC,返回程序 A
- R15:程序计数器
正常操作时,从 R15 读取的值是处理器正在取指的地址,即当前正在执行指令的地址加上 8 个字节(两条 ARM 指令的长度
CPSR(当前程序状态寄存器)
- 条件标志
- 中断使能标志
- 当前处理器的模式
- 其它的一些状态和控制标志
哈佛结构,但是统一编址,共享同一个逻辑地址空间
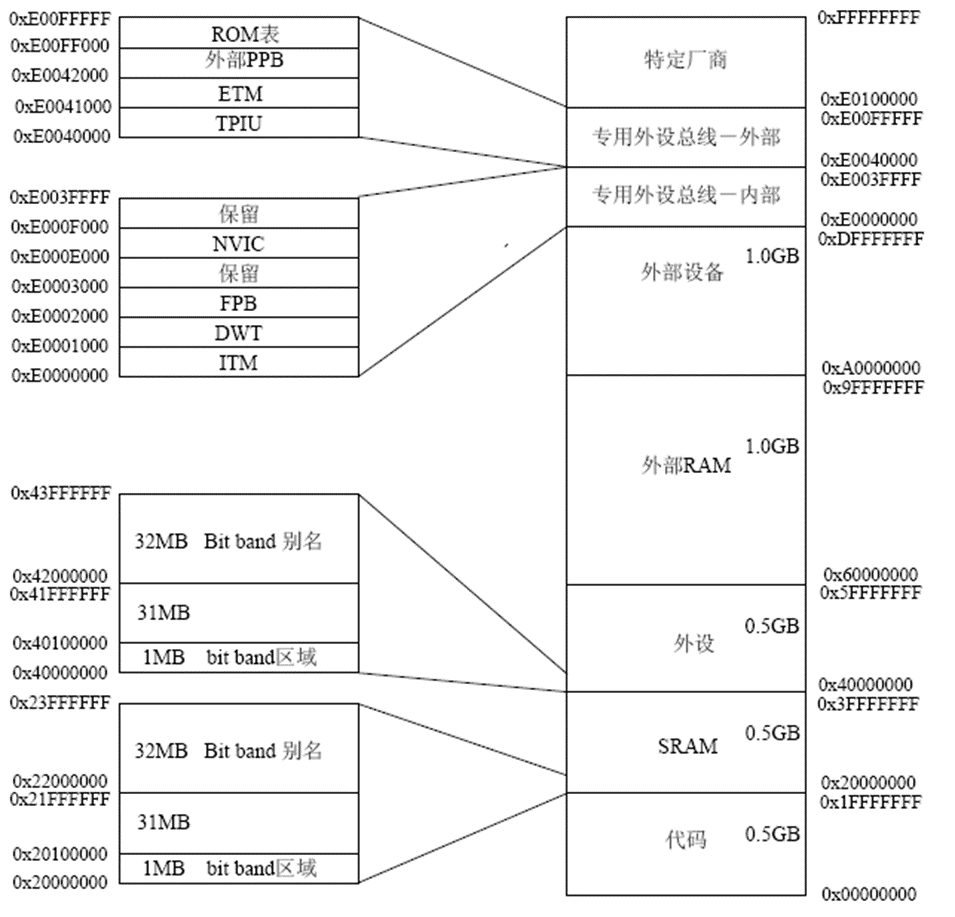
字节: 8 位
半字:16 位(必须分配为占用两个字节)
字:32 位(必须分配为占用 4 各字节)
在小端格式中,高位数字存放在高位字节中。因此存储器系统字节 0 连接到数据线 7~0。
在大端格式中,高位数字存放在低位字节中。因此存储器系统字节 0 连接到数据线 31~24。

调试接口 ¶
1) JTAG: 6 线制接口 2) SWD: 2线制接口
中断 ¶
- 中断优先级可动态重新设置
- 中断数目可配置为 1~240
-
中断优先级的数目可配置为 1~8 位(1~256 级)
(0 优先级最高,255 优先级最低)
- 处理模式和线程模式具有独立的堆栈和特权等级
占先

末位连锁

进程堆栈(process stackSP_process为进程堆栈的SP 寄存器。线程模式在复位后使用主堆栈主堆栈,可以配置为使用进程堆栈。
主堆栈(main stackSP_main 为主堆栈的SP 寄存器。处理模式使用主堆栈,在将 8 个寄存器压栈之后,ISR 使用主堆栈,并且后面所有的抢占中断都使用主堆栈。
复位 ¶
系统复位、电源复位和后备域复位
系统复位:
1.NRST 引脚上的低电平 外部复位 2.窗口看门狗计数终止 (WWDG 复位 3.独立看门狗计数终止 (IWDG 复位 4.软件复位 (SW 复位 5.低功耗管理复位
电源复位: 1.上电 掉电复位 (POR/PDR 复位 2.从待机模式中返回
后备域复位: 1.软件复位,备份区域复位可由设置备份域控制寄存器 (RCC_ 中的 BDRST 位产生。
Thumb-2 指令集 ¶
是加载 / 存储型的,指令集只能处理寄存器的数据,而且处理结果都要放回寄存器,而对数据的访问要通过专门的加载 / 存储指令来完成;
<opcode>{<cond>}{S} <Rd>,<Rn> {, <shift_op2>}
opcode |
操作码,即指令助记符,如 BL,ADD |
cond |
条件码,描述指令执行的条件 |
S |
可选后缀,若在指令后加上“S”,在指令完毕后会自动更新 CPSR 中条件码标志位的值 |
Rd |
ARM 指令中的目标操作数总是一个寄存器,通常用 Rd 表示 |
Rn |
存放第 1 操作数的寄存器 |
opcode2 |
第 2 操作数,它的使用非常灵活,不仅可以是寄存器,还能使用立即数,而且能够使用经过位移运算的寄存器和立即数。 |
9 种寻址方式 ¶
①寄存器寻址
MOV R1,R2 ;R1=R2
SUB R0,R1,R2 ;R0=R1-R2
②立刻寻址
MOV R1,#0xff000 ;R1=0xff000
SUBS R0,R0,#1 ;R0=R0-1
③寄存器偏移寻址
④寄存器间接寻址
⑤基址寻址
⑥多寄存器寻址
⑦堆栈寻址
⑧块拷贝寻址
⑨相对寻址
6 大类指令 ¶
①跳转指令
②数据处理指令
③加载 / 存储指令
④协处理指令
⑤程序状态寄存器访问指令
⑥异常产生指令
4 种伪指令 ¶
①符号定义伪指令
②数据定义伪指令
③汇编控制伪指令
④其它常用伪指令
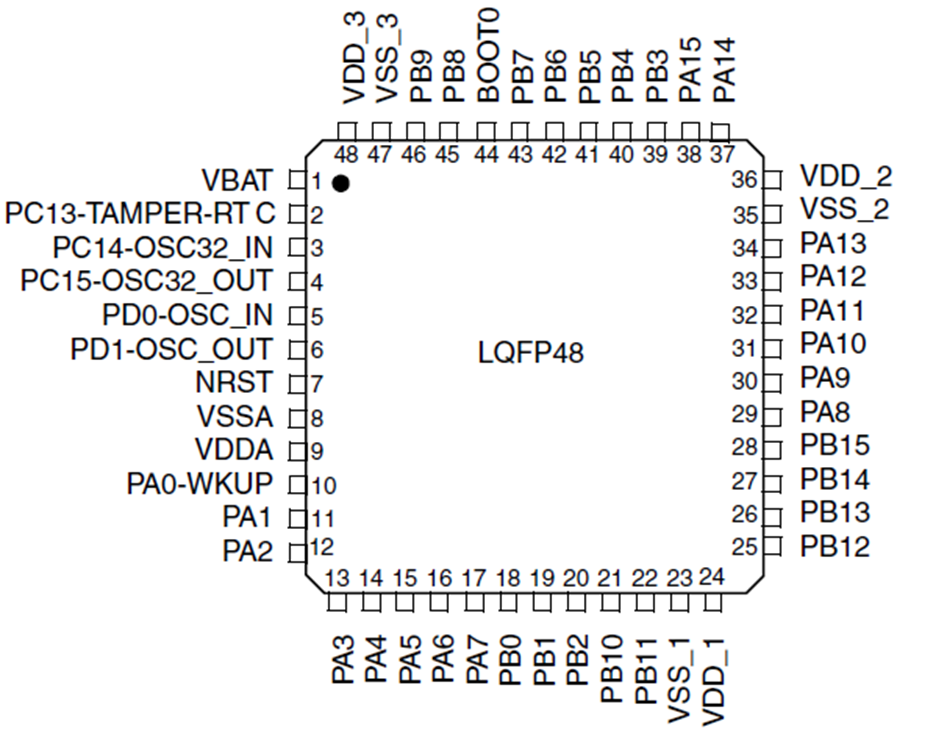
GPIO¶
引脚很多
-
使能 IO 口时钟。调用函数为
RCC_APB2PeriphClockCmd() -
初始化 IO 参数。调用函数 GPIO_Init()。
-
操作 IO。
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //描述 GPIO 寄存器的结构
GPIO_InitStructure.GPIO_Pin = PIN_LED; //选择 LED 控制的引脚 _2
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度 _3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//模式 _4
RCC_APB2PeriphClockCmd(RCC_LED, ENABLE); //给引脚加时钟 _1
GPIO_Init(GPIO_LED, &GPIO_InitStructure); //初始化设置
}
void LED_Sets(uint8_t data)
{
uint16_t setValue;
setValue =GPIO_ReadOutputData( GPIO_LED); // 调用 API
//((uint16_t)GPIOx--> ODR)---->setValue
setValue &= 0x00ff;
setValue |= (uint16_t)data << 8;//data ---->setValue
GPIO_Write(GPIO_LED, setValue); //调用 API
//setValue---->((uint16_t)GPIOx -->ODR) 等效的寄存器操作
}
Timer¶
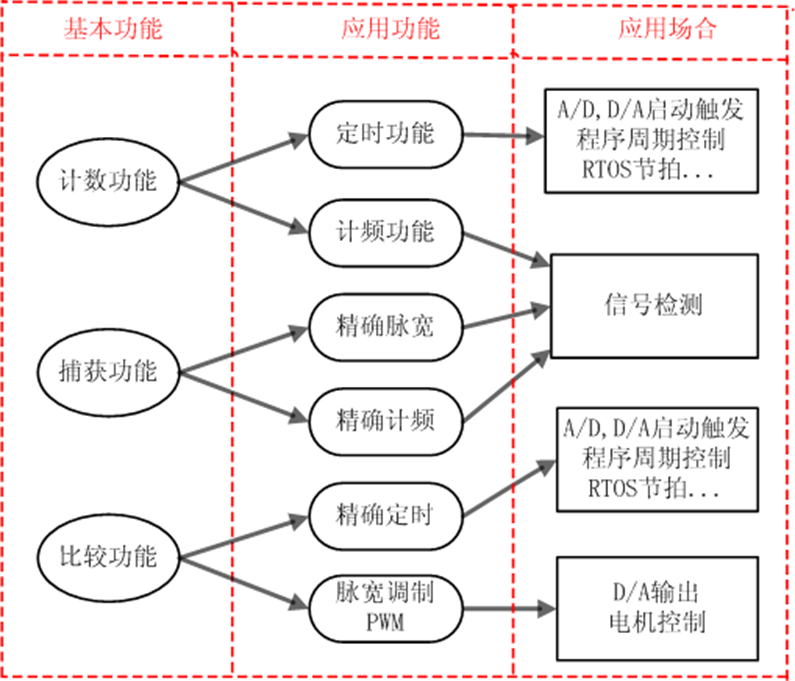
4 个通用 16 位定时器 ¶
- 计数模式:上升、下降、上升和下降
; (对比 51,工作模式多) - T1 为增强型,带互补输出,紧急停止等功能,可用于电机控制
- 中断产生条件:定时器溢出、比较值相等、扑获引脚有指定的跳变
。 (对比 51 定时器中断事件类型多)
1 个 24 位systick timer ¶
为 OS 配置,产生 OS 的任务扫描节拍;
也可用作普通的减计数器;
特征:
- 24 位减计数器;
- 计数值可自动加载;
2 个看门狗定时器 ¶
看门狗:watch dog timer WDT
一个讲的非常好的视频 十行代码,就能让你理解看门狗!
看门狗作用:溢出后自动复位 MCU,防止程序异常跑飞,解决单片机死机的问题
相当于中断时间到了以后,触发的不是中断,而是单片机复位
注意要把狗喂好,不然高频复位的影响不亚于死机。
[ac01] 看门狗就是一条狗,单片机可以领养,也可以不领养,如果领养了,单片机就会发现一个问题,看门狗定期咬它,还只咬它的硬件复位问题,但是又发现,只要在规定时间内喂它就不咬了,所以单片机工作一直很勤奋,如果哪天忘了喂狗,狗会帮他想起来的
代码
WDT time=50 ms; //设置看门狗的定时时间为50ms
WDT =1; //开启看门狗
While (1)
{
Clear WDT(); //喂狗,给看门狗清零
LED1=1; LED2=0; LED3=0; LED4=0;
Delay (10 ms) ;
LED1=0; LED2=1; LED3=0; LED4=0;
Delay (10 ms) ;
LED1=0; LED2=0; LED3=1; LED4=0;
Delay (10 ms) ;
LED1=0; LED2=0; LED3=0; LED4=1;
Delay (10 ms) ;
}
例程 ¶

TIM_DeInit();// 函数将Timer设置为默认值;
TIM_InternalClockConfig();//选择TIMx来设置内部时钟源;
TIM_Prescaler();//来设置预分频系数
TIM_ClockDivision //来设置时钟分割
TIM_CounterMode //来设置计数器模式
TIM_Period //来设置自动装入的值
TIM_ARRPreloadConfig();//来设置是否使用预装载缓冲器
TIM_ITConfig //来开启TIMx的中断
TIM2 通用定时功能,1s 中断一次
void TIMER_cfg()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//重新将Timer设置为缺省值
TIM_DeInit(TIM2);//采用内部时钟给TIM2提供时钟源
TIM_InternalClockConfig(TIM2);
//预分频系数为36000-1,这样计数器时钟为72MHz/36000 = 2kHz
TIM_TimeBaseStructure.TIM_Prescaler = 36000 - 1;//设置时钟分割
TIM_TimeBaseStructure.TIM_ClockDivison = TIM_CKD_DIV1;
//设置计数器模式为向上计数模式
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up
//设置计数溢出大小,每计2000个数就产生一个更新事件
TIM_TimeBaseStructure.TIM_Period = 2000-1
//将配置应用到TIM2中
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
//清除溢出中断标志
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
//禁止ARR预装载缓冲器
TIM_ARRPreloadConfig(TIM2, DISABLE);
//开启TIM2的中断
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
}
PWM 控制
void pwm_cfg(void)
{
TIM_OCInitTypeDef TimOCInitStructure;
//设置缺省值
TIM_OCStructInit(&TimOCInitStructure);
//PWM模式1输出
TimOCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
//TIM输出比较极性高
TimOCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
//使能输出状态
TimOCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
//设置占空比,占空比=(CCRx/ARR)*100%或(TIM_Pulse/TIM_Period)*100%
TimOCInitStructure.TIM_Pulse = 1000;
//TIM1的CH2输出
TIM_OC1Init(TIM1, &TimOCInitStructure);
//设置TIM1的PWM输出为使能
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
}
UART¶
UART | Universal synchronous/asynchronous receiver transmitter,通用同步 / 异步收发器
异步串行的字节帧
UART 通信是以字节帧为单位的,常用的字节帧:
1 个起始位+8 个数据位+1 个校验位+1 个停止位

通信参数
①波特率: pbs,每秒多少位,即每一位的时间宽度;
②数据区长度:8 位(常用
③数据区顺序:低位在先(常用
④奇偶校验位:无、奇校验、偶校验
⑤停止位:1 位、1.5 位、2 位
功能引脚
TX:发送数据输出引脚。
RX:接收。
工作流程 ¶
①接收过程:UART 监听总线,有下跳变时,启动数据采样,一个字节的数据收到后,如果奇偶校验正确,则把数据存到接收寄存器中,置状接收态标志位,并向 CPU 申请中断,让 CPU 及时读取;
②发送过程:UART 的发送寄存器接收到 CPU 写入的数据,立刻启动,按设定的参数逐位发送,发送完毕,置状发送态标志位,并向 CPU 申请中断,告诉 CPU 可以发送下一个字节。
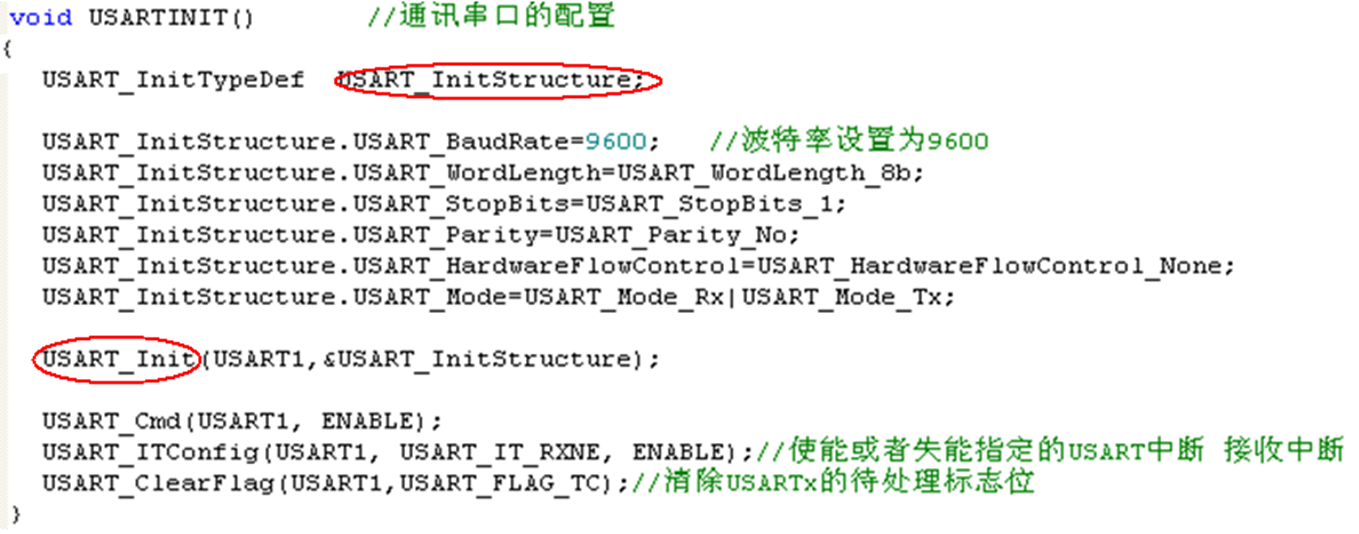
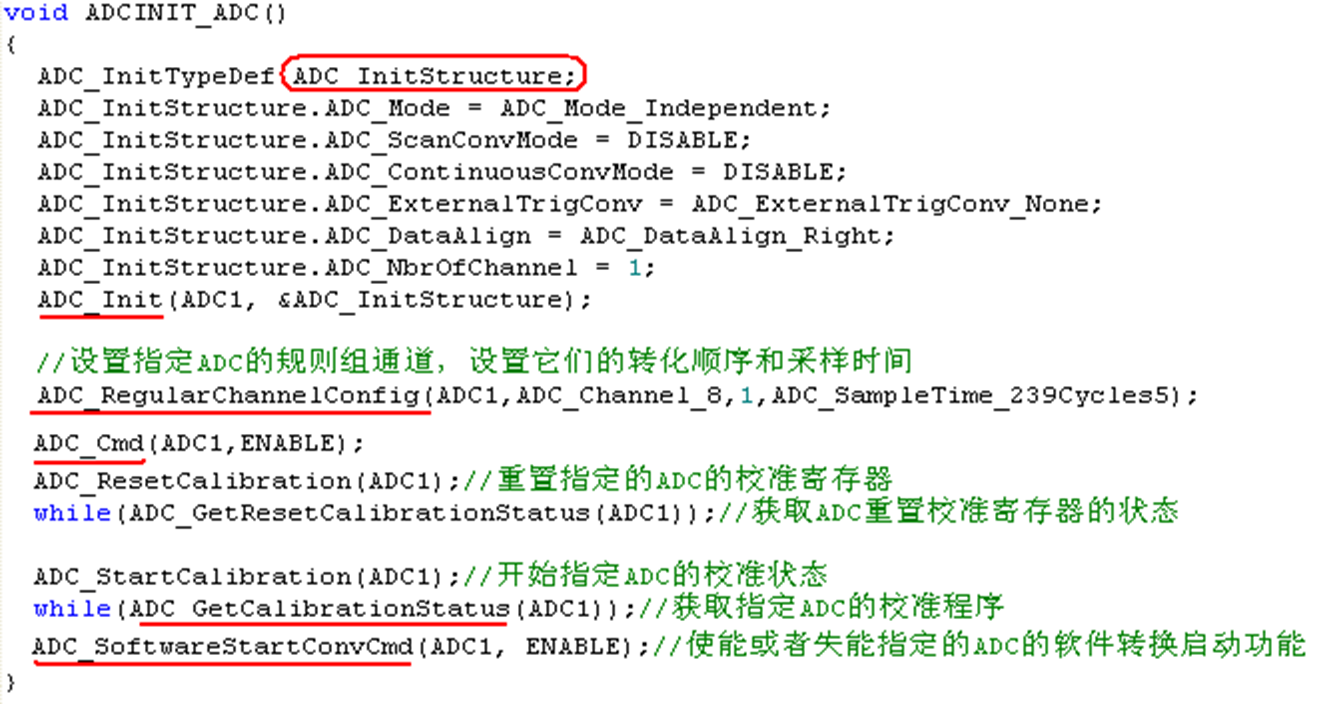
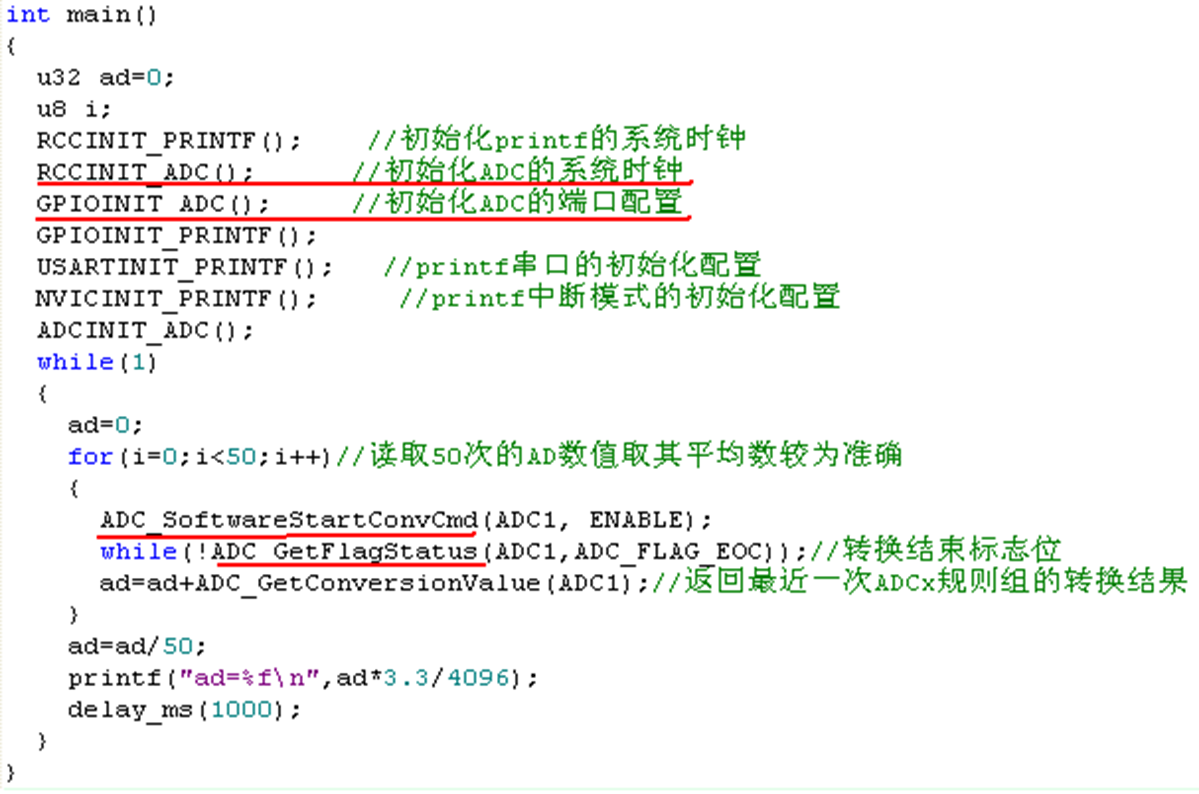
例程 ¶
中断接收 1 个字节,马上发送该字节


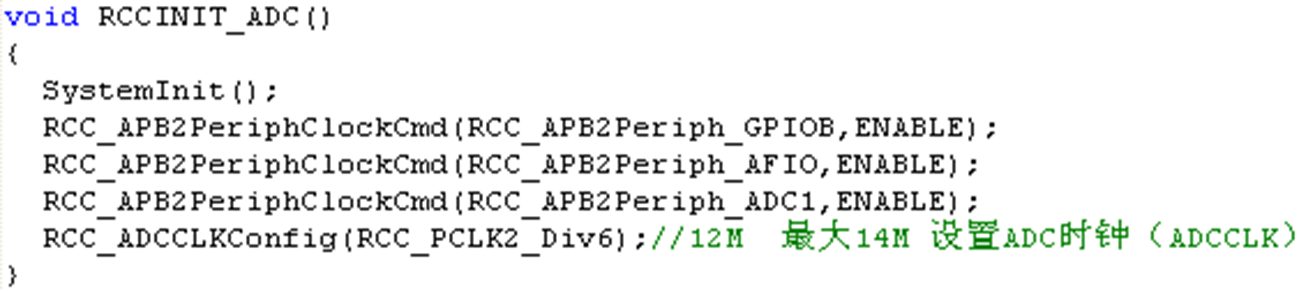
A/D & D/A¶
- 每个 ADC 有多达 16 个外部通道;
- ADC 时钟是 PCLK2 经过预分频器得到;
- A/D 转换时间 1~1.5us
- ADC 工作电压 : 2.4 V to 3.6 V;
- 输入信号电压范围 : VREF- ≤ VIN ≤ VREF+
电压转换公式:按照比例进行分配
STM32 入门学习之 AD 转换 18min 左右;
二、工作方式
1)单次转换模式:在每个通道上,只执行一次转换;
2)连续转换模式:在每个通道上,执行连续转换;
3)扫描转换模式:在一组选定的模拟输入通道上自动转换;
4)启动 A/D 转换
软件命令、定时器 (TIM1) 产生的事件、外部触发和 DMA 触发;其中外部触发和 DMA 触发,允许应用程序同步 AD 转换和时钟的操作;
5) A/D 转换结束后自动产生中断;
6)CPU 通过查询状态位、中断响应、DMA 方式获取 A/D 值。
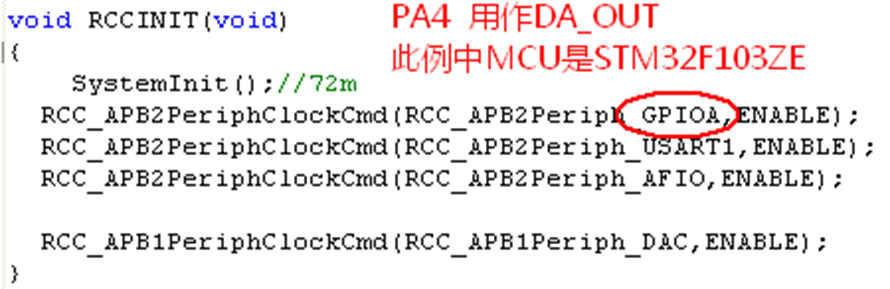
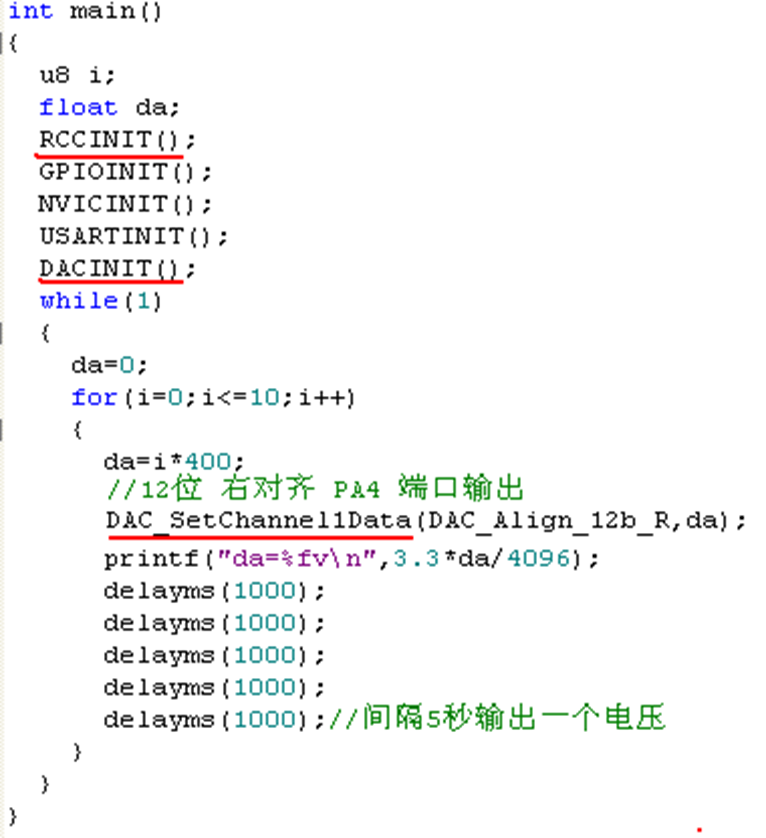
D/A¶
- 外接参考电压 VREF+(与 ADC 共用)输入,可提高 DAC 分辨率;
- 输出电压计算:$ Vout = DA /4096times (VREF^+- VREF^-)$
如果TENx位被置 1,DAC 转换可以由某外部事件触发 ( 定时器计数器、外部中断线 )。
如果选择软件触发,一旦 SWTRIG 位置’1’,转换即开始。