嵌入式小玩具 ¶
约 533 个字 4 行代码 预计阅读时间 2 分钟
平衡小车的控制算法(PID,LQR,MPC) 及 arduino 程序导航贴 _ 平衡车 mpc-CSDN 博客
赛博魔杖 ¶
MagicWand- 基于魔杖的智能家具控制 - 立创开源硬件平台
[ 开源 ] 如何成为赛博法师,STM32 卷积神经网络动作识别 _ 哔哩哔哩 _bilibili
环境配置 ¶
docker 安装 ¶
详见 docker 页面
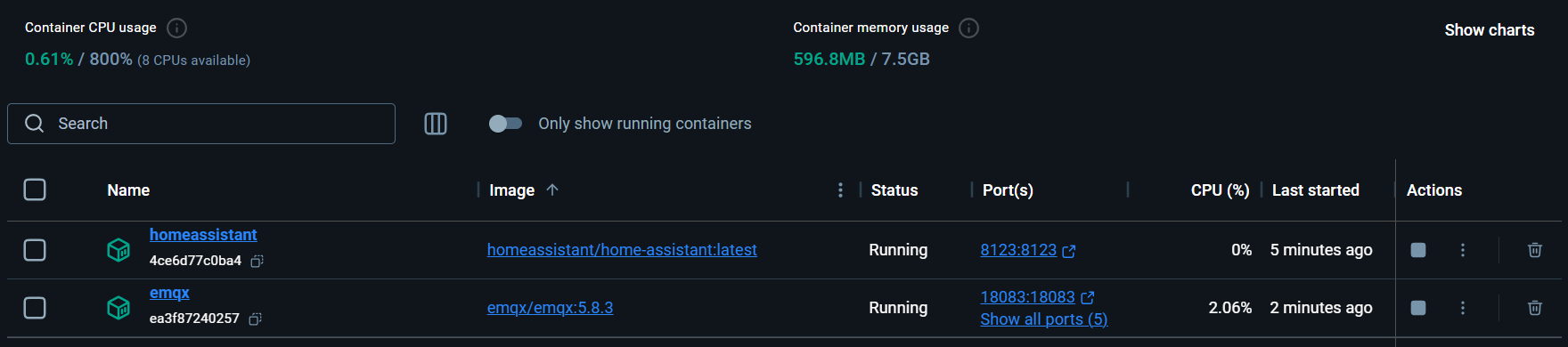
HA¶
docker pull homeassistant/home-assistant:latest
docker run -d --restart always --name homeassistant -v /data/homeassistant/config:/config -e TZ=Asia/Shanghai -p 8123:8123 homeassistant/home-assistant:latest
EMQX¶
docker pull emqx/emqx:5.8.3
docker run -d --name emqx -p 1883:1883 -p 8083:8083 -p 8084:8084 -p 8883:8883 -p 18083:18083 emqx/emqx:5.8.3
【教程】home assistant 接入大模型,小爱唤醒与控制 _ 哔哩哔哩 _bilibili
HomeAssistant 成功接入豆包大模型,迎接 AI_ 智能家居 _ 什么值得买
【Home Assistant 之 QQ 邮箱推送提醒】_hacs 极速版使用 -CSDN 博客
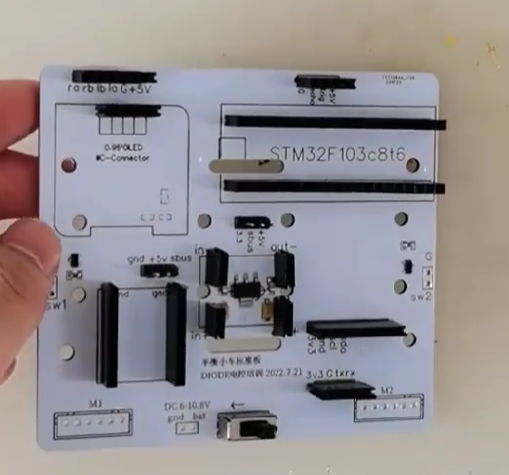
动量轮平衡车 ¶
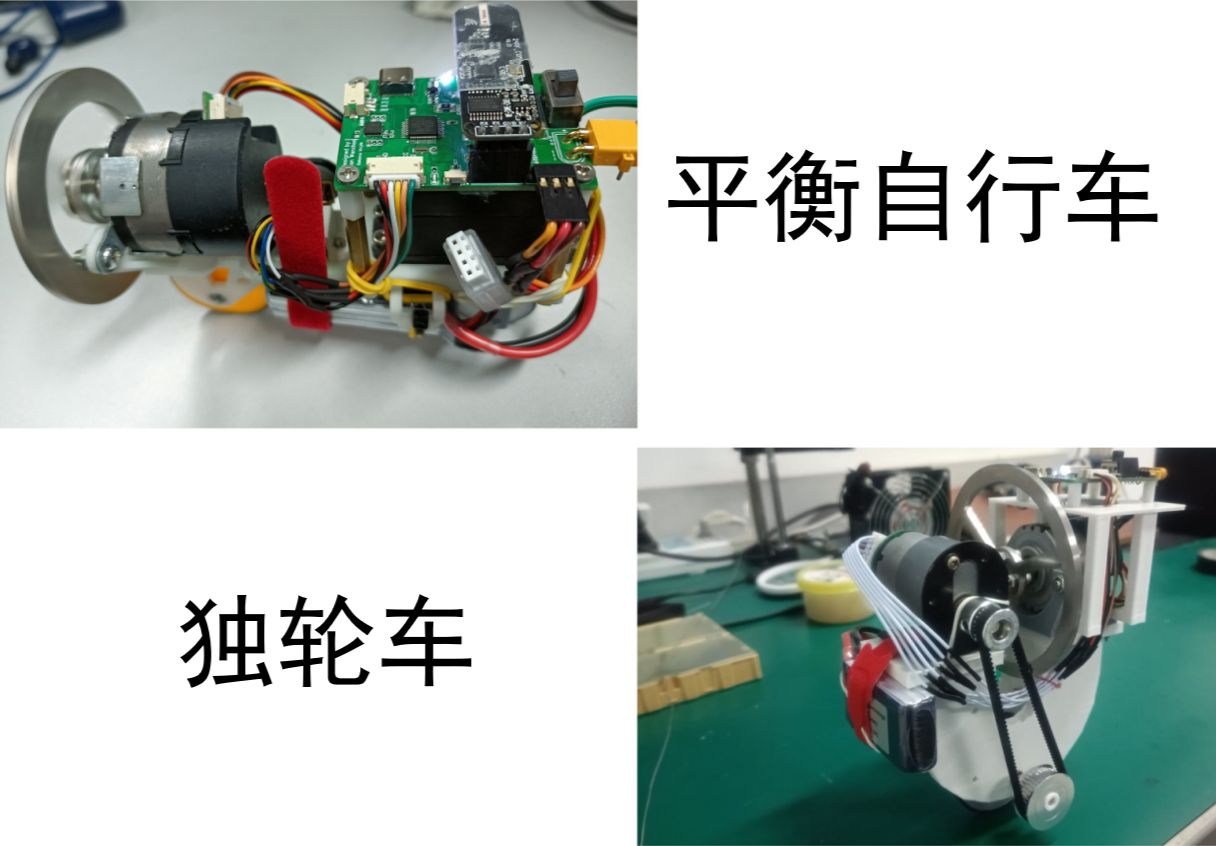
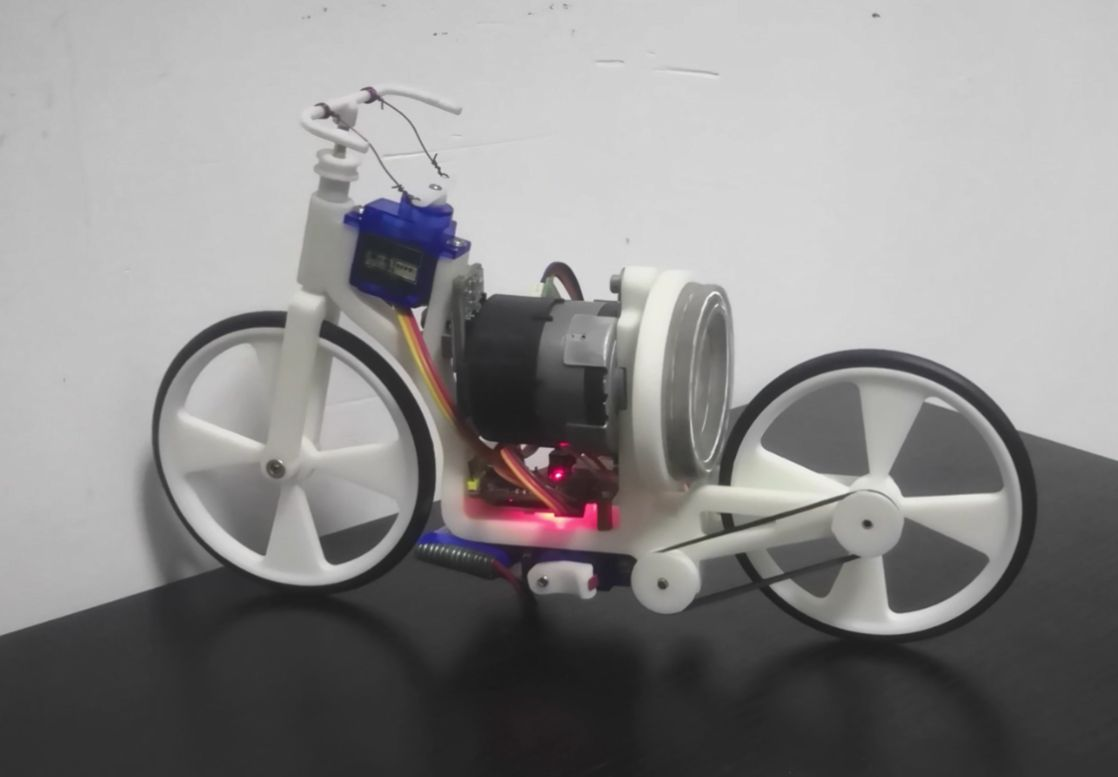
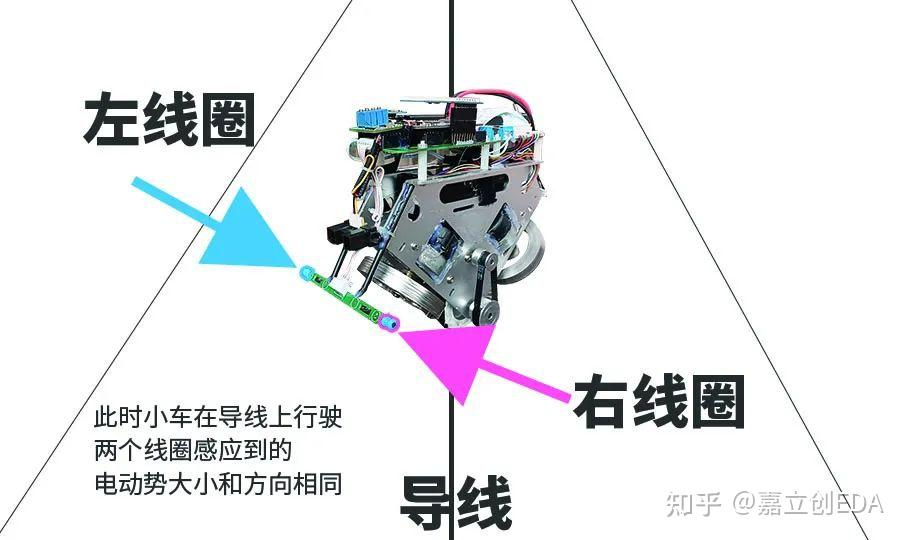
PID 平衡车 ¶
组装 ¶
焊接 ¶
sbus
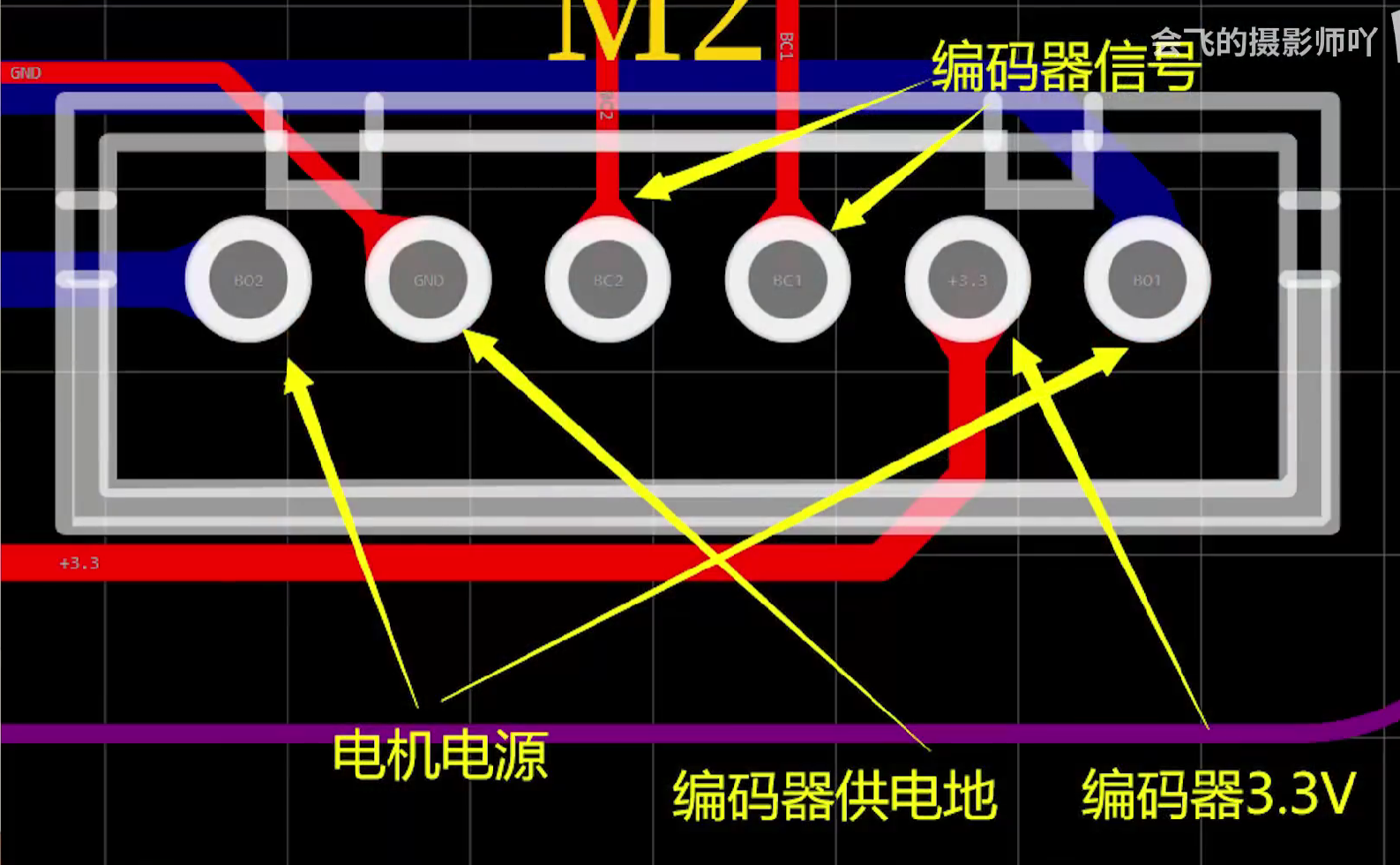
连线 ¶
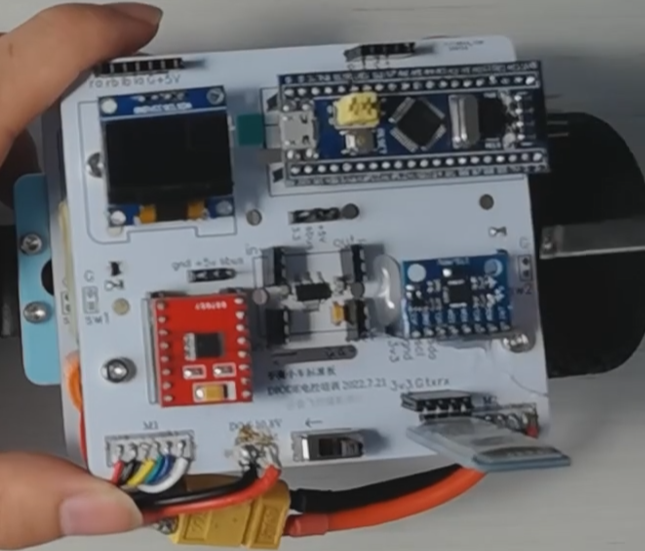
电机驱动不要装反

编码器电源的两根线不要连反,连反会烧掉
MOS 输出不可以接入感性负载:如电机、电磁铁
框架 ¶
底板使用 M3 螺丝
代码 ¶
freetros框架
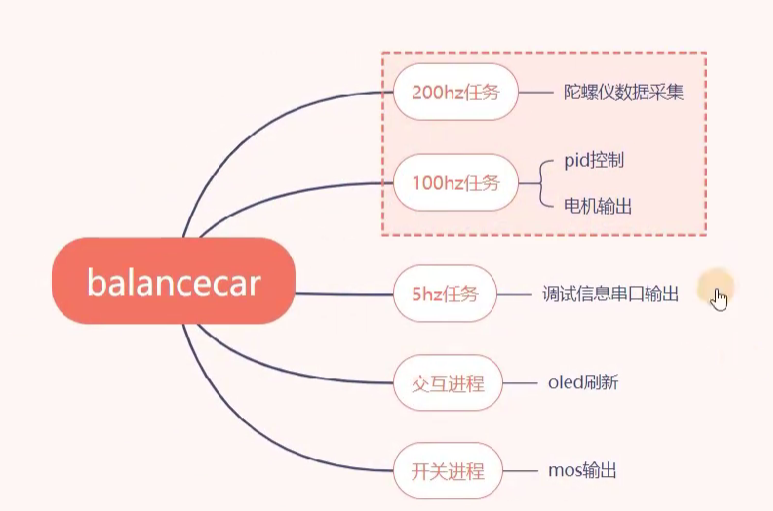
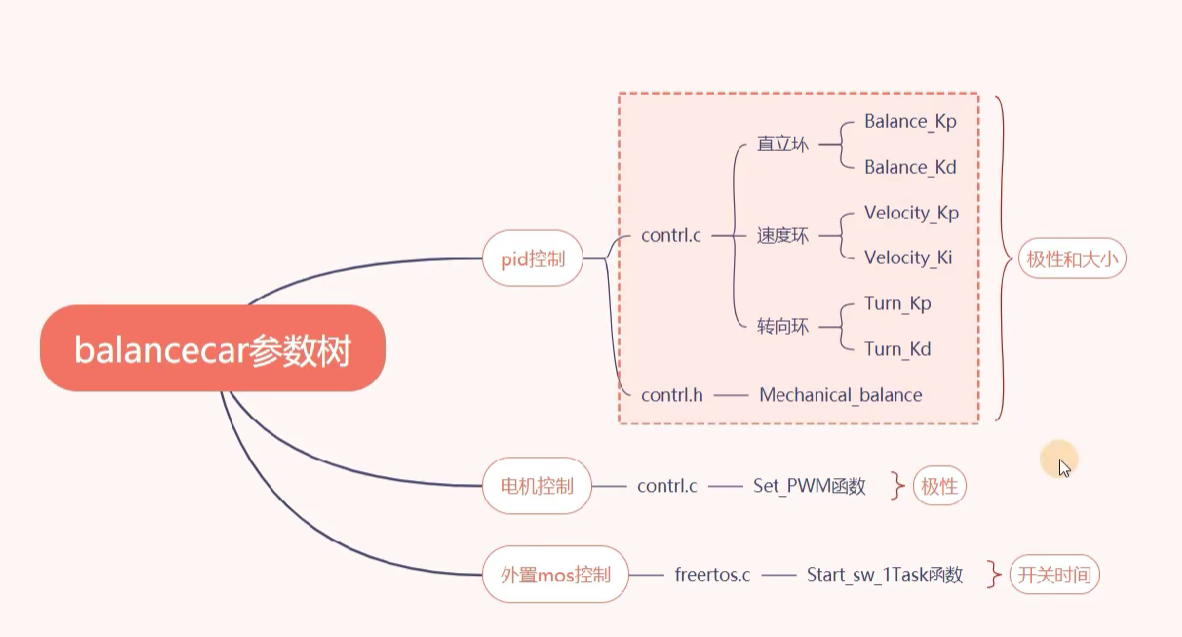
control.c进行 PID 调参
Set_PWM
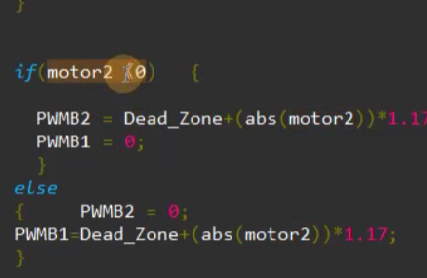
电机死区
平衡算法 ¶
- PID
- 前馈 PID
- 模糊 PID
- LQR
RC 小车 ¶
¶
ミニッツ RWD MR-04 レディセット シボレー コルベット C8.R ガンメタル / レッド 32356GMR - KYOSHO RC
MPC and MHE implementation in Matlab using Casadi - Workshop_ 哔哩哔哩 _bilibili
[MPCC in FSAC] 基于 MPCC 的无人系统控制设计思路 -CSDN 博客
MMehrez/MPC-and-MHE-implementation-in-MATLAB-using-Casadi
硬核 WiFi/4G/5G 网络遥控车制作教程 | 树莓派实验室
RCFans 论坛 【自建赛道】 完成 【制作全过程分享】 - Powered by Discuz!
四足 ¶
stanfordroboticsclub/StanfordQuadruped
桌面机器人 ¶
【全开源】ATom-Bot 桌面机器人 - 立创开源硬件平台
轮腿机器人 ¶
LeTian-robot2(轮腿机器人) - 立创开源硬件平台
平衡轮腿式步兵车
