8051 实验 ¶
约 2353 个字 607 行代码 4 张图片 预计阅读时间 17 分钟
汇编编程 ¶
基本指令 ¶
延时 ¶
定时 ¶
中断 ¶
串口 ¶
LCD¶
C51 编程 ¶
以 main 函数为主体
C51 片内空间有限,运算能力有限
特殊功能寄存器都定义好了
| 数据类型 | 长度 ( 位 ) | 取值范围 | |
|---|---|---|---|
| 字符型 | signed char |
8 | -128~127 |
unsigned char |
8 | 0~255 | |
| 整 型 | signed int |
16 | -32768~32767 |
unsigned int |
16 | 0~65535 | |
| 长整型 | signed long |
32 | -21474883648~21474883647 |
unsigned long |
32 | 0~4294967295 | |
| 浮点型 | float |
32 | ±1.75494E-38~±3.402823E+38 |
| 位 型 | bit |
1 | 0,1 |
sbit |
1 | 0,1 | |
| 访问 SFR | sfr |
8 | 0~255 |
sfr16 |
16 | 0~65535 |
存储器分类
| 存储器类型 | 长度(位) | 对应单片机存储器 |
|---|---|---|
bdata |
1 | 片内 RAM,位寻址区,共 128 位 |
data |
8 | 片内 RAM,直接寻址,共 128 字节。 |
idata |
8 | 片内 RAM,间接寻址,共 256 字节。 |
pdata |
8 | 片外 RAM,分页间址,共 256 字节MOVX @Ri) |
xdata |
16 | 片外 RAM,间接寻址,共 64k 字节MOVX @DPTR) |
code |
16 | ROM 区域,间接寻址,共 64k 字节MOVC @DPTR) |
访问片内 RAM 比访问片外 RAM 的速度要快得多,所以对于经常使用的变量应该置于片内 RAM 中,即用bdata、data、idata来定义;对于不经常使用的变量或规模较大的变量应该置于片外 RAM 中,即用pdata、xdata来定义。
bit bdata flags; /* 位变量flags定位在片内RAM的位寻址区 */
char data var; /* 字符变量var定位在片内RAM区 */
float idata x,y,z; /* 实型变量x,y,z定位在片内间址RAM区 */
sfr P1=0x90; /* 定义P1口地址为90H */
默认 data 低 128 位上
特殊功能寄存器的定义
80C51 单片机内部有 21 个特殊功能寄存器
sfr 特殊功能寄存器名 = 地址常数;
sbit 位变量名 = 特殊功能寄存器名^位的位置(0~7)
sfr SCON = 0x90;/*定义串行口控制寄存器,地址为0x90 */
sfr P0 = 0x80; /*定义P0口,地址为0x80 */
sfr16 T2 = 0xCC;/*定义80C52的T2L地址为0xCC,T2H地址为0xCD*/
sfr PSW=0xD0;/* 定义PSW寄存器地址为0xD0 */
sbit OV=PSW^2; /* 定义OV位为PSW.2,地址为0xD2 */
sbit CY=PSW^7; /* 定义CY位为PSW.7,地址为0xD7 */
运算与控制 ¶
与 c 语言一致
- 加减乘除 mod
- 自增自减
- 关系运算
- 逻辑运算
&&!|| - 位运算符:单符号对位进行操作,双符号对字节进行操作
- 类型转换:
bit→char→int→long→float,signed→unsigned
指针 ¶
一般指针占用 3 个字节:
- 第一个字节存放该指针的存储器类型编码(由编译模式的默认值确定)
- 第二和第三个字节分别存放该指针的高位和低位地址偏移量。
| 存储器类型 | bdata/ data / idata |
xdata |
pdata |
code |
|---|---|---|---|---|
| 编码 | 0x00 | 0x01 | 0xfe | 0xff |
例如:
xdata类型,地址为0x1234的指针表示为:第一字节为0x01,第二字节为0x12,第三字节为0x34。
一般指针可用于存取任何变量而不必考虑变量在 80C51 单片机存储空间的位置,许多 C51 库函数采用了一般指针。例如:
char *xdata strptr; /* 位于xdata 空间的一般指针 */
int *data number;/* 位于data 空间的一般指针 */
函数 ¶
参数表有改造
函数的一般定义形式为:
返回值类型 函数名(形式参数列表)[编译模式][reentrant][interrupt n][using n]
{
函数体
}
interrupt区分中断函数和普通函数;
reentrant用于定义可重入函数。
interrupt n用于定义中断函数,n 为中断号,可以为 0~31,通过中断号可以决定中断服务程序的入口地址。
using n用于确定中断服务函数所使用的工作寄存器组,n 为工作寄存器组号,取值为 0~3。
| 中断源 | 外中断 0 | 定时器 0 | 外中断 1 | 定时器 1 | 串行口 |
|---|---|---|---|---|---|
| 中断号 | 0 | 1 | 2 | 3 | 4 |
参数传递
C 语言和汇编语言的相互调用
| 传递的参数 | char、1 字节指针 | int、2 字节指针 | long、float | 一般指针 |
|---|---|---|---|---|
| 参数 1 | R7 | R6、R7 | R4~R7 | R1、R2、R3 |
| 参数 2 | R5 | R4、R5 | R4~R7 | R1、R2、R3 |
| 参数 3 | R3 | R2、R3 | R1、R2、R3 |
库函数
reg51.h
reg52.h
实例
在一 80C51 单片机应用系统中,外中断 0引脚接一个开关,并行端口线 P1.0接一个发光二级管。
要求系统的功能是,开关闭合一次,发光二极管的状态改变一次。相应的程序为:
#include “reg51.h”
#include “intrins.h”
sbit P10 = P1^0
Sbit INT0= P3^2
void delay(void) //延时操作
{
int a = 5000;
while(a--)
_nop_( );
}
void int_srv (void) interrupt 0
{
delay( );
if(INT0 == 0){
P10 = ! P10;
while(INT0 == 0);//按下后等待,而不会一直切换
}
}
void main()
{
P10 = 0;
EA = 1;//中断使能
EX0 = 1;
while(1);
}
定时计数器编程示例
例 利用定时 / 计数器T0的方式 1,产生 10ms 的定时,并使P1.0引脚上输出周期为 20ms 的方波,采用中断方式,设系统时钟频率为12 MHz。
1、计算计数初值X:
由于晶振为12 MHz,所以机器周期\(T_{cy}\)为\(1\mu s\)。因此:
\(N=\frac{t}{T_{cy}} =10\times10-3/1\times10-6=10000\)
因计数器是向上计数,计数到10000时溢出,所以计数器初值为-10000。应将-(10000/256)送入TH0中,-(10000%256)送入TL0中。
2、求T0的方式控制字TMOD:
M1M0=01,GATE=0,C/ =0,可取方式控制字为01H;
#include “reg51.h”
sbit P10 = P1^0;
void timer0(void) interrupt 1
{
P10 = ! P10;
TH0 = -(10000/256);//重新初始化
TL0 = -(10000%256);
}
void main(void)
{
TMOD = 0x01; //定时器初始化
P10 = 0;
TH0 = -(10000/256);
TL0 = -(10000%256); //初始值
EA = 1; //中断使能
ET0 = 1;
TR0 = 1; //启动计时器
while(1);
}
A/D 转换接口编程示例
ADC0809 与单片机的接口电路如图所示。采用查询方式采集数据的应用程序为: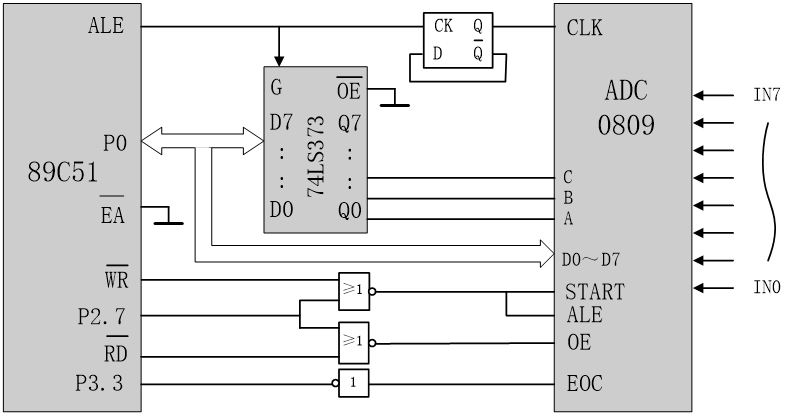
# include “reg51.h”
# include “absacc.h”
# define uchar unsigned char
# define IN0 XBYTE[0x7ff8]
sbit ad_busy = P3^3;
void main(void)
{
uchar data ad[10];
while(1)
{
ad0809(ad);
}
}
void ad0809(uchar idata *x)
{
uchar i;
uchar xdata * ad_adr;
ad_adr = & IN0;
for(i = 0;i < 8;i ++)
{
* ad_adr = 0; /*启动转换*/
i = i; /*延时等待*/
i = i;
while(ad_busy == 0);
x[i] = * ad_adr; /*存转换结果*/
ad_adr ++; /*下一通道*/
}
}
交通灯 ¶
交通灯实验代码,改了部分端口
整理了一下才发现还是需要读懂代码到底干了什么
C 语言程序实现 ¶
下面的代码大概有三个功能
- 端口的定义和映射,要和连线一一对应
- 数码管的赋值和显示
- 中断函数与定时器的设置
#include "reg52.h"
typedef unsigned int u16;
typedef unsigned char u8;
sbit LSA=P2^5;//这里端口随便改都行,和实际接口一致就可以
sbit LSB=P2^6;
sbit LSC=P2^7;
//定义灯的映射关系
#define GPIO_DIG P0
#define GPIO_TRAFFIC P1
sbit RED10 = P1^0;
sbit GREEN10 = P1^1;
sbit RED11 = P1^2;
sbit YELLOW11= P1^3;
sbit GREEN11 = P1^4;
sbit RED00 = P3^0;
sbit GREEN00 = P3^1;
sbit RED01 = P1^5;
sbit YELLOW01= P1^6;
sbit GREEN01 = P1^7;
u8 code smgduan[50]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,
0x77,0x7c,0x39,0x5e,0x79,0x71,0x3d,
0x76,0x0f,0x0e,0x75,0x38,0x37,0x54,
0x5c,0x73,0x67,
0x31,0x49,0x78,
0x3e,0x1c,0x7e,0x64,0x6e,0x59};
u8 DisplayData[8];
u8 Second;
void delay(u16 i)
{
while(i--);
}
void DigDisplay()
{
u8 i;
for(i=0;i<8;i++)
//这个循环的意思是:对于8位数码管的每一位,先通过译码器选择对应位,再赋对应的数值
{
switch(i)
{
case(0):
LSA=0;LSB=0;LSC=0; break;
case(1):
LSA=1;LSB=0;LSC=0; break;
case(2):
LSA=0;LSB=1;LSC=0; break;
case(3):
LSA=1;LSB=1;LSC=0; break;
case(4):
LSA=0;LSB=0;LSC=1; break;
case(5):
LSA=1;LSB=0;LSC=1; break;
case(6):
LSA=0;LSB=1;LSC=1; break;
case(7):
LSA=1;LSB=1;LSC=1; break;
}
GPIO_DIG=DisplayData[i];
delay(100);
GPIO_DIG=0x00;
}
}
void Timer0Init() //定时器的初始化和开关
{
TMOD|=0X01;
TH0 = 0XFC;
TL0 = 0X18; //计算中断条件
ET0 = 1;//打开定时器0中断开关
EA = 1;//打开中断总开关
TR0 = 1;//打开定时器0
}
void main()
{
Second = 1;
Timer0Init(); //这里打开定时器
while(1)
{
DisplayData[4] = 0x71;//F
DisplayData[5] = 0x3e;//U
DisplayData[6] = 0x39;//C
DisplayData[7] = 0x75;//K
//可以删掉上边四行
if(Second == 30)
{
Second = 1;
}
if(Second < 11)
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(10 - Second) % 100 / 10];
DisplayData[3] = smgduan[(10 - Second) %10];
DigDisplay();
GPIO_TRAFFIC = 0xFF;
RED00 = 1;
GREEN00 = 1;
GREEN11 = 0;
GREEN10 = 0;
RED01 = 0;
RED00 = 0;
}
else if(Second < 16)
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(15 - Second) % 100 / 10];
DisplayData[3] = smgduan[(15 - Second) %10];
DigDisplay();
GPIO_TRAFFIC = 0xFF;
RED00 = 1;
GREEN00 = 1;
YELLOW11 = 0;
RED10 = 0;
YELLOW01 = 0;
RED00 = 0;
}
else if(Second < 26)
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(25 - Second) % 100 / 10];
DisplayData[3] = smgduan[(25 - Second) %10];
DigDisplay();
GPIO_TRAFFIC = 0xFF;
RED00 = 1;
GREEN00 = 1;
RED11 = 0;
RED10 = 0;
GREEN01 = 0;
GREEN00 = 0;
}
else
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(30 - Second) % 100 / 10];
DisplayData[3] = smgduan[(30 - Second) %10];
DigDisplay();
GPIO_TRAFFIC = 0xFF;
RED00 = 1;
GREEN00 = 1;
YELLOW11 = 0;
RED10 = 0;
YELLOW01 = 0;
RED00 = 0;
}
}
}
void Timer0() interrupt 1
{
static u16 i;
TH0=0XFC;
TL0=0X18;
i++;
if(i==1000)
{
i=0;
Second ++;
}
}
汇编程序参考¶
S_OK BIT 20H.0 ; 定义一个位变量 S_OK,在 20H 寄存器的第 0 位
ORG 0000H ; 程序从地址 0000H 开始
SJMP MAIN ; 在复位时跳转到 MAIN 函数
ORG 000BH ; 定义中断向量地址 000BH (定时器 0 中断)
AJMP SECOND ; 在定时器 0 中断时跳转到 SECOND 函数
ORG 0030H ; 程序代码从地址 0030H 开始
TAB2: DB 03FH,06H,05BH,04FH,66H,6DH,7DH,07H,7FH,6FH
//主程序
MAIN:
MOV SP,#60H ; 设置堆栈指针 SP 的起始地址为 60H
CLR EA ; 关闭所有中断
MOV TMOD,#01H ; 定时器 0 设置为模式 1(16 位定时器)
MOV TL0,#0B0H ; 设定定时器初值 TL0 为 0B0H
MOV TH0,#3CH ; 设定定时器初值 TH0 为 3CH
SETB ET0 ; 使能定时器 0 中断
SETB PT0 ; 设置定时器 0 中断优先级
SETB EA ; 使能全局中断
SETB TR0 ; 启动定时器 0
MOV R0,#10 ; 初始化 R0 为 10
Light:
ACALL GREEN ; 南北绿灯,东西红灯
ACALL YELLOW ; 南北黄灯,东西黄灯
ACALL RED ; 南北红灯,东西绿灯
ACALL YELLOW ; 南北黄灯,东西黄灯
AJMP Light ; 循环执行上述指令
//中断程序
SECOND:
CLR EA ; 关闭所有中断
CLR S_OK ; 清除标志位 S_OK
DEC R0 ; R0 减 1
MOV A,R0 ; 将 R0 的值移动到累加器 A
JZ SECOND_1 ; 如果 R0 为 0 跳转到 SECOND_1
ACALL LED ; 调用 LED 子程序,更新显示
SECOND_2:
MOV TH0,#3CH ; 重新装载定时器初值
MOV TL0,#0BFH
SETB EA ; 使能全局中断
RETI ; 返回中断
SECOND_1:
MOV R0,#25 ; 如果 R0 为 0,将 R0 重置为 25
SETB S_OK ; 设置标志位 S_OK
SJMP SECOND_2 ; 跳转到 SECOND_2
//信号灯控制程序;
;注意这里要注意板子上的连接
;LED的控制是高位暗,低位(0)灭
GREEN:
MOV DPTR,#06H ; 设置 DPTR 寄存器
MOV A,#01111001B ; 南北方向绿灯,东西方向红灯
MOV P1,A ; 输出到端口 P1
MOV A,#11111110B
MOV P3,A
MOV R1,#10 ; 设置 R1 为 10
TLP:
JNB S_OK,TLP ; 等待 S_OK 标志位
CLR S_OK ; 清除 S_OK 标志位
DJNZ R1,TLP ; R1 减 1,如果不为 0,跳回 TLP
RET ; 返回
YELLOW:
MOV A,#10110111B ; 南北方向黄灯,东西方向黄灯
MOV P1,A ; 输出到端口 P1
MOV A,#11111111B
MOV P3,A
MOV R1,#5 ; 设置 R1 为 5
TLP1:
JNB S_OK,TLP1 ; 等待 S_OK 标志位
CLR S_OK ; 清除 S_OK 标志位
DJNZ R1,TLP1 ; R1 减 1,如果不为 0,跳回 TLP1
RET ; 返回
RED:
MOV A,#11001110B ; 南北方向红灯,东西方向绿灯
MOV P1,A ; 输出到端口 P1
MOV A,#11111101B
MOV P3,A
MOV R1,#10 ; 设置 R1 为 10
TLP2:
JNB S_OK,TLP2 ; 等待 S_OK 标志位
CLR S_OK ; 清除 S_OK 标志位
DJNZ R1,TLP2 ; R1 减 1,如果不为 0,跳回 TLP2
RET ; 返回
//LED显示程序
LED:
MOV DPTR,#TAB2 ; 设置 DPTR 指向查找表
MOV A,R1 ; 将 R1 的值移动到累加器 A
DEC A ; A 减 1
MOVC A,@A+DPTR ; 取查找表中的值
MOV P0,A ; 输出到端口 P0
RET ; 返回
END
在程序中,S_OK 的作用是:
- 在定时器中断中:
- 当定时器达到设定的计数值时,会触发中断,在中断服务程序
SECOND中,S_OK被设置(SETB S_OK)以通知主程序定时已经到期。
- 当定时器达到设定的计数值时,会触发中断,在中断服务程序
- 在主程序中:
- 主程序会不断检测
S_OK的状态。如果S_OK被设置,意味着一个时间段(例如 10ms)已经过去,主程序可以执行下一步操作。 - 使用
JNB S_OK, label指令来等待S_OK被设置。如果S_OK未被设置,程序会在当前循环等待;一旦S_OK被设置,程序将继续执行。
- 主程序会不断检测
对应关系¶
初始化部分
MAIN:
MOV SP,#60H
CLR EA ;关中断
MOV TMOD,#01H ;设定时钟方式
MOV TL0,#0B0H ;设定定时器/计数器T0为时钟常数(100ms)
MOV TH0,#3CH
SETB ET0 ;允许中断/计数器T0中断
SETB PT0 ;启动定时器/计数器T0
SETB EA ;开中断
SETB TR0 ;启动定时器/计数器T0
void Timer0Init()
{
TMOD |= 0x01; // 选择为定时器0模式,工作模式1,设置TR0启动
TH0 = 0xFC; // 设置定时初值,使计时1ms
TL0 = 0x18;
ET0 = 1; // 允许定时器0中断
EA = 1; // 使能总中断
TR0 = 1; // 启动定时器
}
void main()
{
Second = 1;
Timer0Init();
...
}
中断部分
SECOND:
CLR EA
CLR S_OK
DEC R0
MOV A,R0
JZ SECOND_1
JZ SECOND_2
SECOND_1:
MOV RO,#10
SETB S_OK
SECOND_2:
MOV TH0,#3CH
MOV TL0,#0BFH
SETB EA
RETI
void Timer0() interrupt 1
{
static u16 i;
TH0 = 0xFC; // 设置定时初值,使计时1ms
TL0 = 0x18;
i++;
if(i == 1000)
{
i = 0;
Second++;
}
}
这段汇编代码是一个基于 8051 单片机的交通灯控制系统,代码中包含了许多常用的指令,以下是这些指令的含义和用法:
指令解释 ¶
基本指令 ¶
MOV dest, src: 将源操作数src的值传送到目的操作数dest。- 示例:
MOV SP,#60H将立即数60H装入堆栈指针SP。
- 示例:
CLR bit: 将指定位清零(置 0) 。- 示例:
CLR EA将全局中断使能位清零。
- 示例:
SETB bit: 将指定位置 1。- 示例:
SETB EA将全局中断使能位置 1。
- 示例:
JZ label: 如果累加器A的值为零,则跳转到指定标签。- 示例:
JZ SECOND_1如果A为 0,则跳转到SECOND_1。
- 示例:
SJMP label: 无条件跳转到指定标签。- 示例:
SJMP MAIN无条件跳转到MAIN。
- 示例:
JB bit, label: 如果指定位为 1,则跳转到指定标签。- 示例:
JB ACC.2,EMERG如果累加器A的第 2 位为 1,则跳转到EMERG。
- 示例:
DEC reg: 将指定寄存器的值减 1。- 示例:
DEC R0将寄存器R0的值减 1。
- 示例:
DJNZ reg, label: 将指定寄存器的值减 1,如果减 1 后的结果不为 0,则跳转到指定标签。- 示例:
DJNZ R1,TLP将R1减 1,如果R1不为 0,则跳转到TLP。
- 示例:
RET: 从子程序返回。- 在这段代码中未使用。
RETI: 从中断服务程序返回。- 示例:
RETI返回主程序。
- 示例:
中断和定时器 ¶
ORG address: 设置程序起始地址。- 示例:
ORG 0000H设置程序起始地址为0000H。
- 示例:
AJMP address: 绝对跳转到指定地址。- 示例:
AJMP SECOND绝对跳转到SECOND。
- 示例:
MOV TL0,#value: 将立即数装入定时器 / 计数器 0 的低 8 位。- 示例:
MOV TL0,#0B0H将0B0H装入TL0。
- 示例:
MOV TH0,#value: 将立即数装入定时器 / 计数器 0 的高 8 位。- 示例:
MOV TH0,#3CH将3CH装入TH0。
- 示例:
MOV TMOD,#value: 设置定时器 / 计数器模式寄存器TMOD的值。- 示例:
MOV TMOD,#01H设置TMOD为模式 1(16 位定时器 / 计数器) 。
- 示例:
SETB TR0: 启动定时器 / 计数器 0。- 示例:
SETB TR0启动定时器 0。
- 示例:
CLR TR0: 停止定时器 / 计数器 0。- 在这段代码中未使用。
位操作 ¶
S_OK BIT 20H.0: 定义位变量S_OK在20H地址的第 0 位。- 示例:
S_OK BIT 20H.0定义S_OK。
- 示例:
数码管 ¶
共阴极接法
对应表
u8 code smgduan[50]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,
0x77,0x7c,0x39,0x5e,0x79,0x71,0x3d,
0x76,0x0f,0x0e,0x75,0x38,0x37,0x54,
0x5c,0x73,0x67,
0x31,0x49,0x78,
0x3e,0x1c,0x7e,0x64,0x6e,0x59};
LED¶
LED 采用共阳接法
所以高电平是熄灭
拉电流——电流更大
灌电流——电流小,不足以驱动
串口通信 ¶
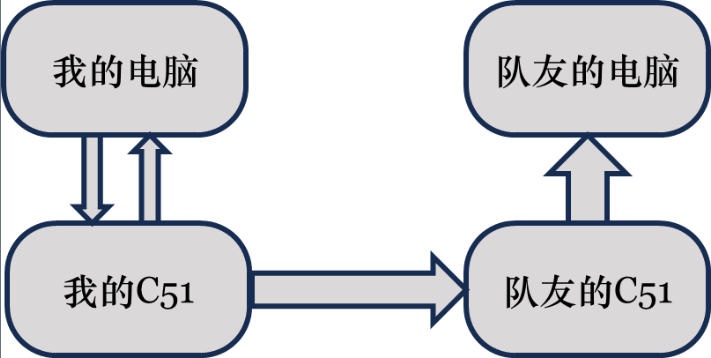
复制代码就行了,如果想玩,可以和你的队友连起来 P3.0 P3.1 互换连接
不想玩的话其实 1min 烧录一下例程代码就结束了
//将波特率设置为4800
//接受端口
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
void UsartInit()
{
SCON=0X50; //设置为工作方式1
TMOD=0X20; //设置计数器工作方式2
PCON=0X80; //波特率加倍
TH1=0XF3; //计数器初始值设置,注意波特率是4800的
TL1=0XF3;
ES=1; //打开接收中断
EA=1; //打开总中断
TR1=1; //打开计数器
}
void main()
{
UsartInit(); // 串口初始化
while(1);
}
void Usart() interrupt 4
{
u8 receiveData;
receiveData=SBUF;//出去接收到的数据
RI = 0;//清除接收中断标志位
}
//发送端口
void Usart() interrupt 4
{
u8 receiveData;
receiveData=SBUF;//出去接收到的数据
RI = 0;//清除接收中断标志位
SBUF=receiveData*2;//将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
}
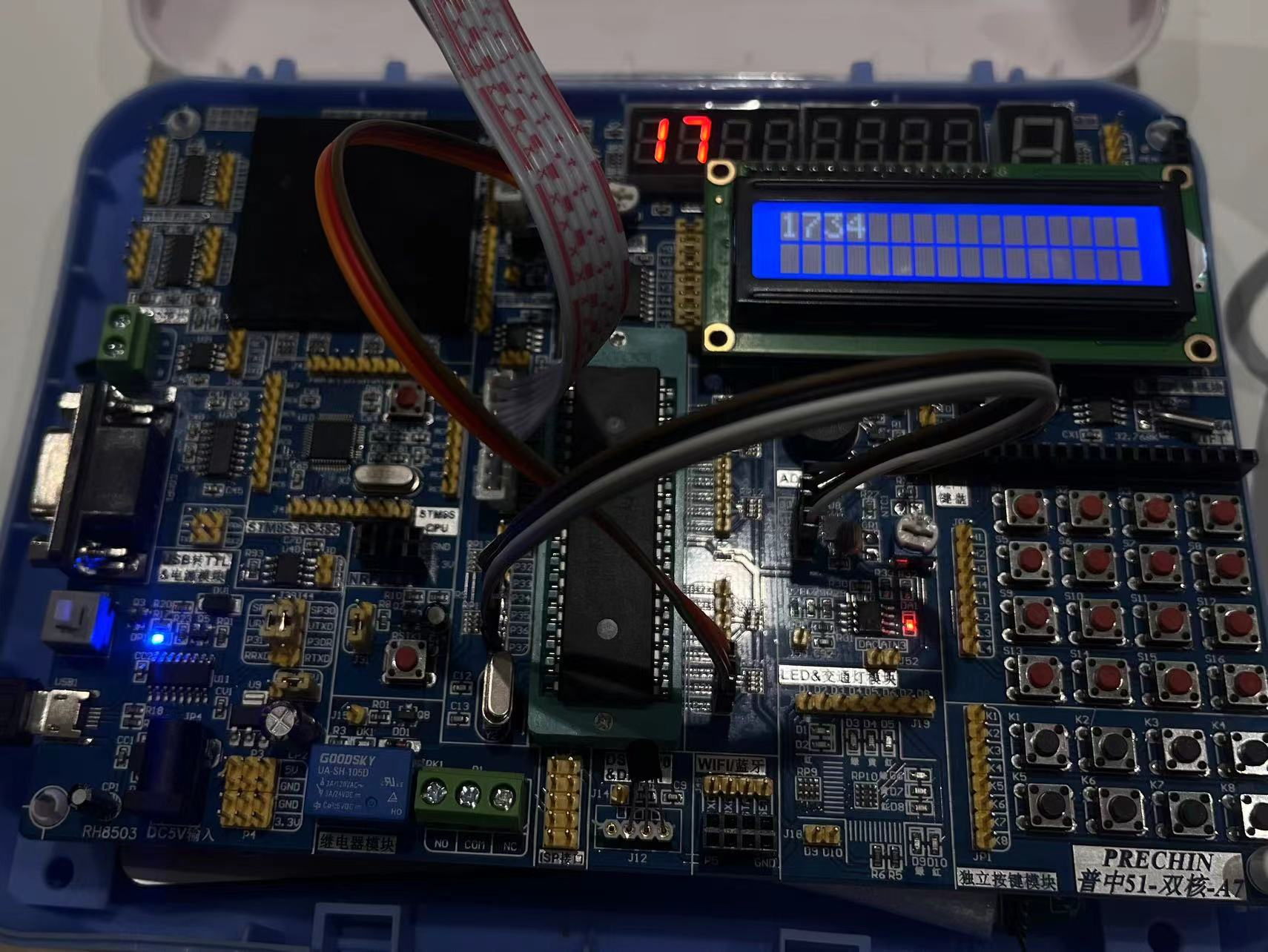
可以实现大概这个效果。如果两个同时发送的话,可能数字会越来越大(我设置的是翻倍发送)
LCD & ADC¶
#include "reg52.h"//此文件中定义了单片机的一些特殊功能寄存器
#include "lcd.h"
#include "XPT2046.h"
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
#define GPIO_DIG P1
sbit LSA=P2^0;
sbit LSB=P2^1;
sbit LSC=P2^2;
//要非常注意LCD使用P2.5,P2.6,P2.7端口,不能混用,不然会有问题
u8 disp[5];
u8 isp[4];
u8 code smgduan[50]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,
0x77,0x7c,0x39,0x5e,0x79,0x71,0x3d,
0x76,0x0f,0x0e,0x75,0x38,0x37,0x54,
0x5c,0x73,0x67,
0x31,0x49,0x78,
0x3e,0x1c,0x7e,0x64,0x6e,0x59};
/***
* 函 数 名: delay
* 函数功能: 延时函数,i=1时,大约延时10us
***/
void delay(u16 i)
{
while(i--);
}
/***
* 函数名:datapros()
* 函数功能:数据处理函数
***/
void datapros()
{
u16 temp;
temp = Read_AD_Data(0x94); // AIN0 电位器
disp[0]=smgduan[temp/1000];//千位
disp[1]=smgduan[temp%1000/100];//百位
disp[2]=smgduan[temp%1000%100/10];//个位
disp[3]=smgduan[temp%1000%100%10];
isp[0]=temp/1000+'0';
isp[1]=temp%1000/100+'0';//百位
isp[2]=temp%1000%100/10+'0';//个位
isp[3]=temp%1000%100%10+'0';
}
/***
* 函数名:DigDisplay()
* 函数功能:数码管显示函数
***/
void DigDisplay()
{
u8 i;
for(i=0;i<4;i++)
{
switch(i)
{
case(0):
LSA=0;LSB=0;LSC=0; break;
case(1):
LSA=1;LSB=0;LSC=0; break;
case(2):
LSA=0;LSB=1;LSC=0; break;
case(3):
LSA=1;LSB=1;LSC=0; break;
case(4):
LSA=0;LSB=0;LSC=1; break;
case(5):
LSA=1;LSB=0;LSC=1; break;
case(6):
LSA=0;LSB=1;LSC=1; break;
case(7):
LSA=1;LSB=1;LSC=1; break;
}
GPIO_DIG=disp[i];
delay(100);
GPIO_DIG=0x00;
}
}
void Timer0Init()
{
TMOD|=0X01;
TH0=0XFC;
TL0=0X18;
ET0=1;
EA=1;
TR0=1;
}
void main(void)
{
Timer0Init();
LcdInit();
disp[4] = 0x5c;
disp[5] = 0x5c;
disp[6] = 0x5c;
disp[7] = 0x75;
while(1)
{
DigDisplay();//数码管显示函数
}
}
void Timer0() interrupt 1
{
static u16 i;
u16 j;
TH0=0XFC;
TL0=0X18;
i++;
if(i==1100)
{
i=0;
datapros(); //数据处理函数
LcdWriteCom(0x01); //清屏
for(j=0;j<4;j++)
{
LcdWriteData(isp[j]);
}
}
}
这里使用定时中断完全是为了好玩,为了让显示刷新率不那么高设置的。
而且感觉使用循环的方法进行延时非常的蠢,所以定时 \(500-700ms\) 来完成任务。可以更改if(i == 1000)这个语句来设置延时的长短,这里还可以完成很多其他基于时间的操作。
还有需要注意到的是,每次刷新 LCD 的屏幕可以不使用lcdinit()函数,而可以直接使用LcdWriteCom(0x01);清屏函数。
//---定义使用的IO口---//
sbit DOUT = P3^7; //输出
sbit CLK = P3^6; //时钟
sbit DIN = P3^4; //输入
sbit CS = P3^5; //片选
要非常注意这段头文件中给出的引脚定义,因为之前我引脚是随便连的,就导致我的 LCD 和数码管其实是使用的同样的引脚,就会出现很多很多奇怪的问题,所以一个教训就是不要随意更改接口,如果需要更改,那么请弄清楚有没有接口是这次实验中已经用到的(可能通过板子进行连接的)